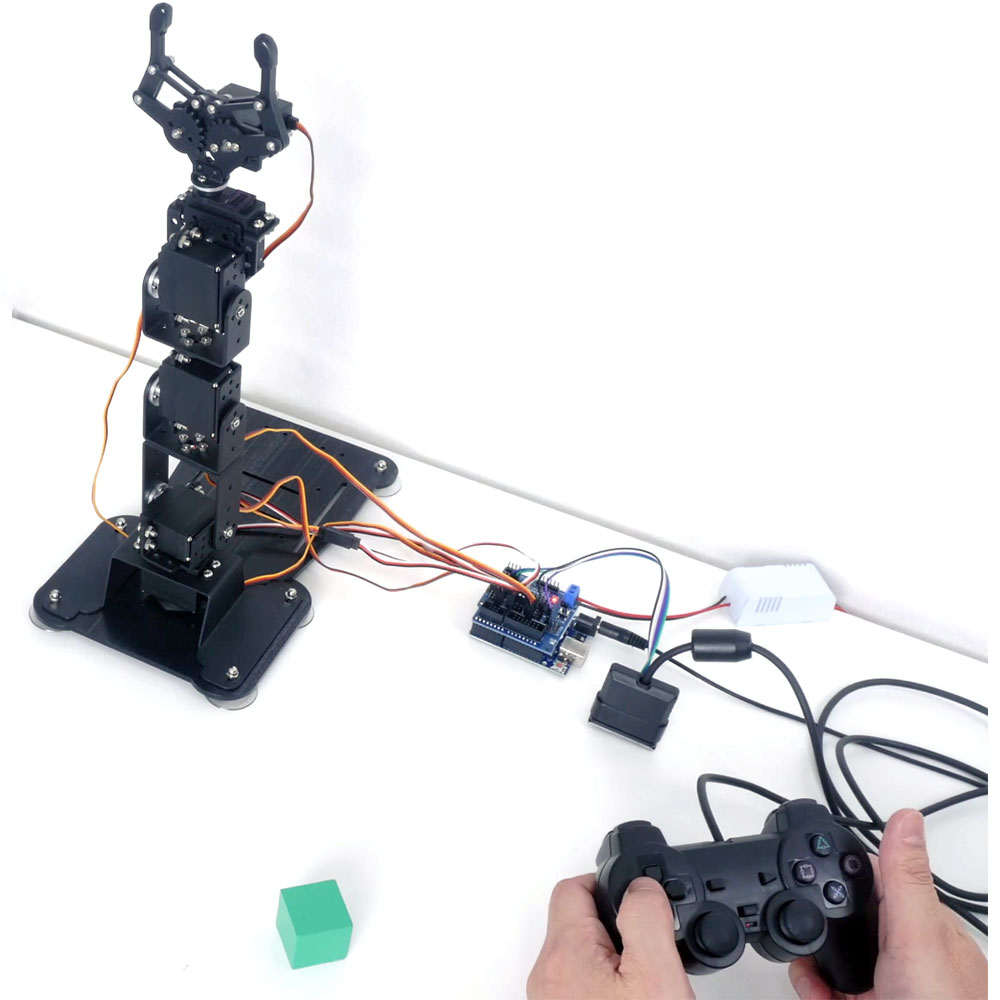
PS2 호환 게임패드(게임컨트롤러, 조이스틱)로 로봇팔 제어하기
PS2 호환 게임패드를 변환 모듈을 통해 아두이노 보드와 연결하고 이 게임패드로 6자유도 로봇팔을 조정하는 등 아두이노를 활용한 다양한 응용 분야에서 활용가능합니다.
PS2 호환 게임패드를 변환 모듈을 통해 아두이노 보드와 연결하고 이 게임패드로 6자유도 로봇팔을 조정하는 등 아두이노를 활용한 다양한 응용 분야에서 활용가능합니다.
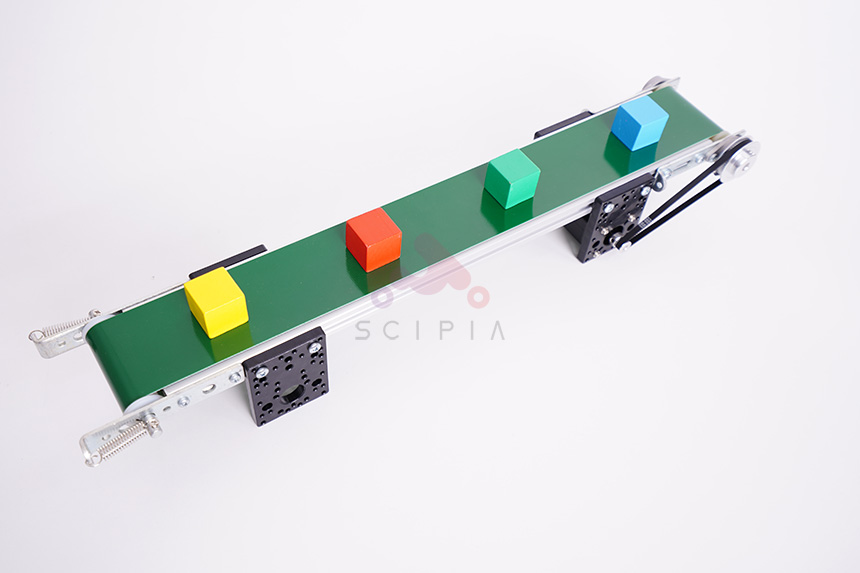
미니 데스크탑 컨베이어벨트는 탁상에 올려놓을 수 있는 소형 사이즈의 컨베이어벨트로서 아두이노, 라즈베리파이 등을 활용하여 스마트공장 실습을 할 수 있으며 공장자동화 교육, PLC교육, 기타 소형 공장자동화 시스템에서도 활용가능합니다.
이 컨베이어벨트는 스텝모터로 구동되며 타이밍 풀리 벨트로 연결되어 3:1로 감속은 물론 토크가 증가됩니다.
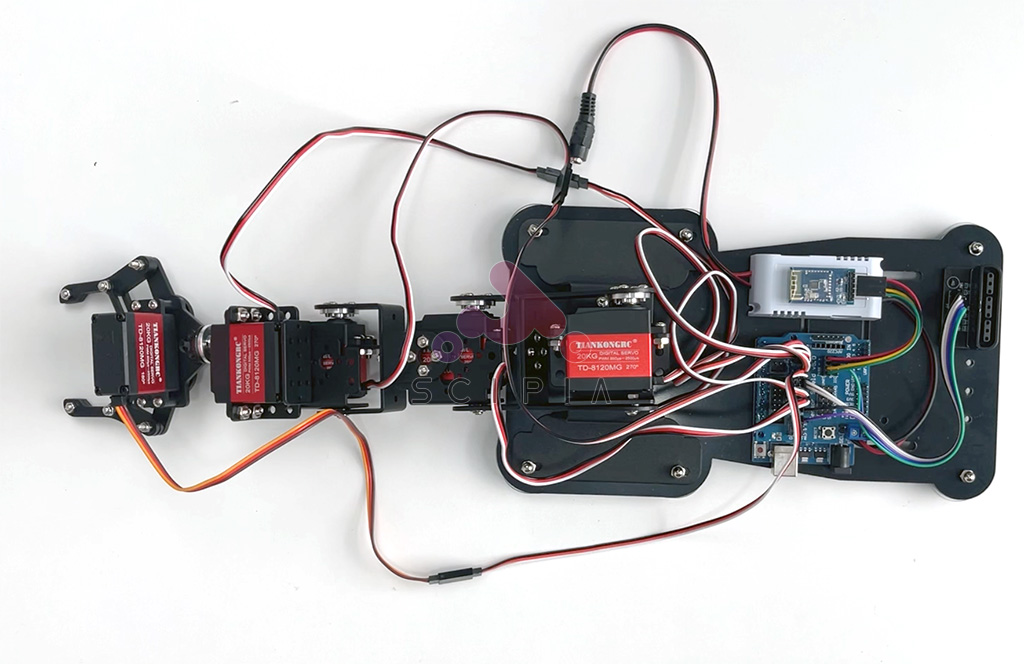
싸이피아(SCIPIA) 로보콘(ROBOCON) 로봇팔 조립 튜토리얼 2편입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 기본적으로 20kg급의 디지털 서보모터 6개로 동작됩니다.
2편에서는 전체적인 결선 및 아두이노 보드와 연결, 기타 제어방법에 대하여 설명합니다.
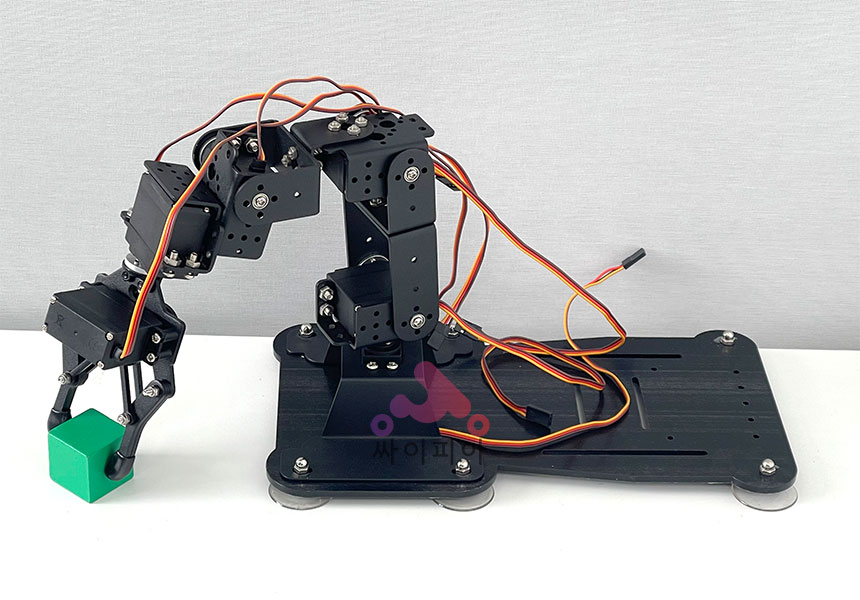
싸이피아(SCIPIA) 로보콘(ROBOCON) R1 로봇팔 조립 튜토리얼 입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 심플한 구조와 대형 흡착판 사용으로 조작 편의성을 증대하였습니다.
서보모터 구성품만 다른 두 가지의 제품 구성이 있습니다. 조립방법은 동일합니다.
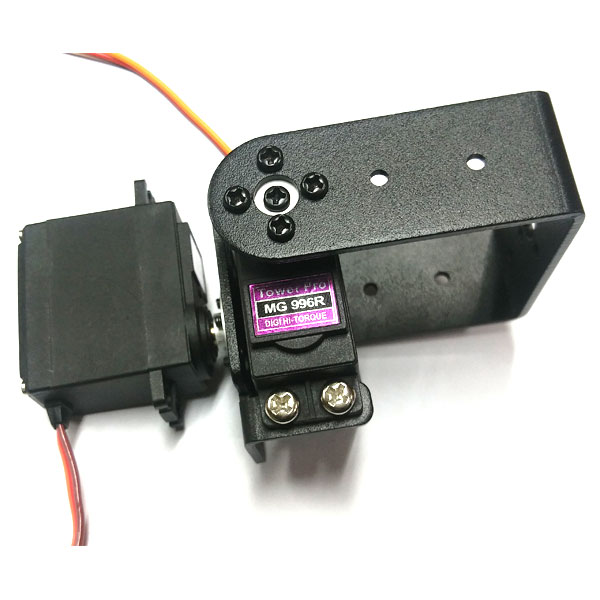
알루미늄 재질의 서보 브라켓입니다. MG995 또는 MG996R 서보 모터 사용가능하며 각종 로봇 제작 및 카메라 팬틸트 등에 사용가능합니다.
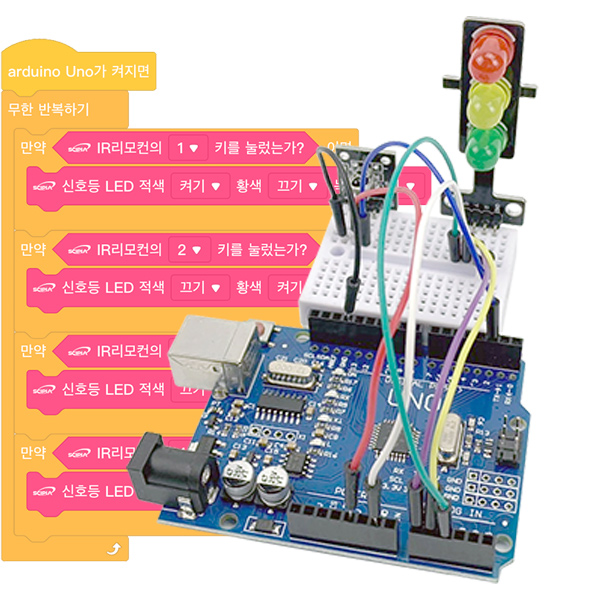
이번에는 적외선 리모컨으로 신호등 LED 모듈을 제어해봅니다.
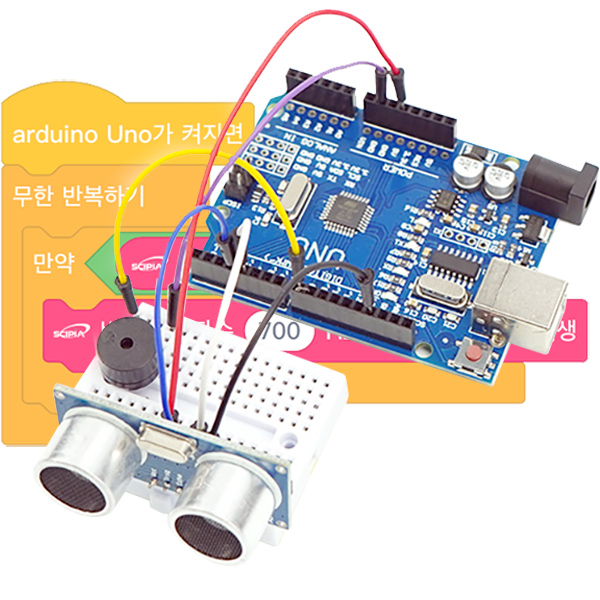
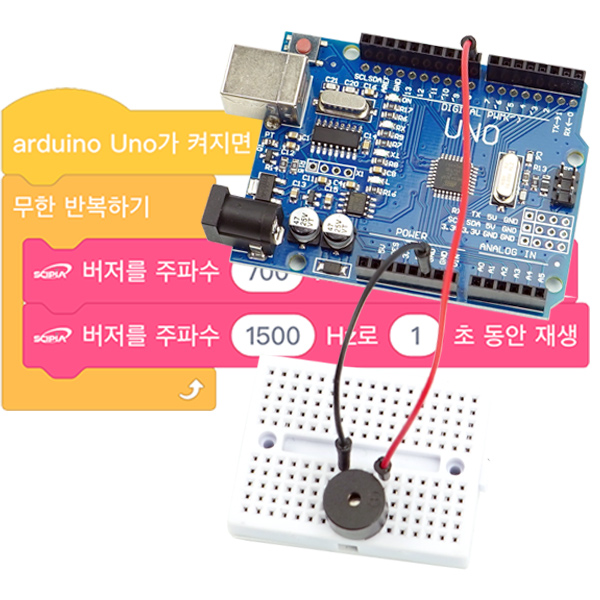
이번에는 HC-SR04 초음파 모듈로 거리가 가까워지면 패시브버저(Passive Buzzer)가 소리를 내는 실험을 합니다.