싸이피아 로보콘(SCIPIA ROBOCON) 아두이노 로봇팔 키트 조립 튜토리얼#2-6자유도 메탈 블루투스 무선 스마트폰 제어
싸이피아(SCIPIA) 로보콘(ROBOCON) 로봇팔 조립 튜토리얼 2편입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
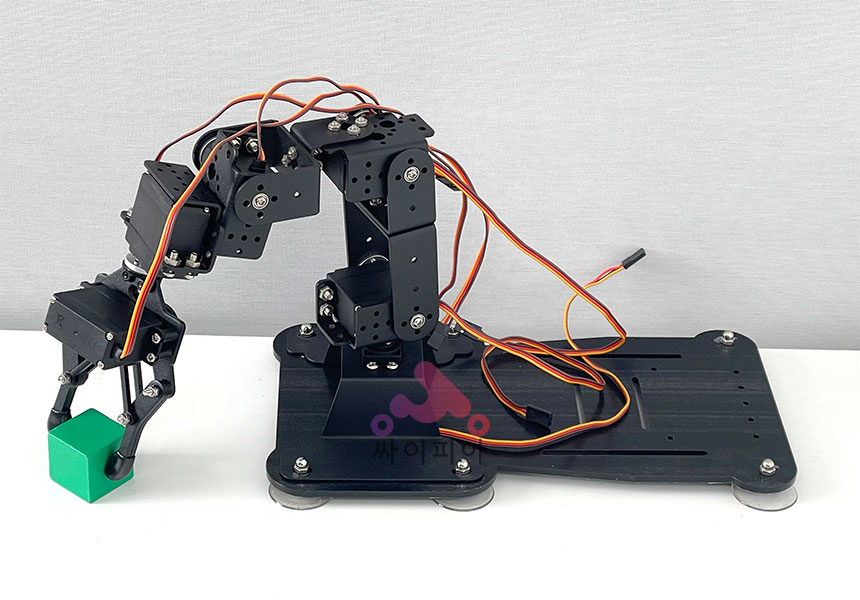
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 기본적으로 20kg급의 디지털 서보모터 6개로 동작됩니다.
2편에서는 전체적인 결선 및 아두이노 보드와 연결, 기타 제어방법에 대하여 설명합니다.
1. 따라하기 조립 동영상 (YOUTUBE)
2. 조립 튜토리얼
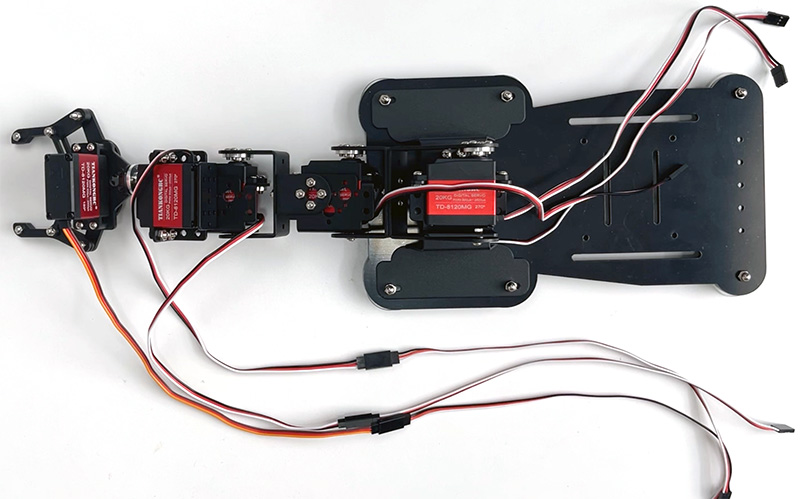
결선을 위해 로봇암 상부쪽 3개 서보 모터의 선을 연장케이블로 연장합니다.
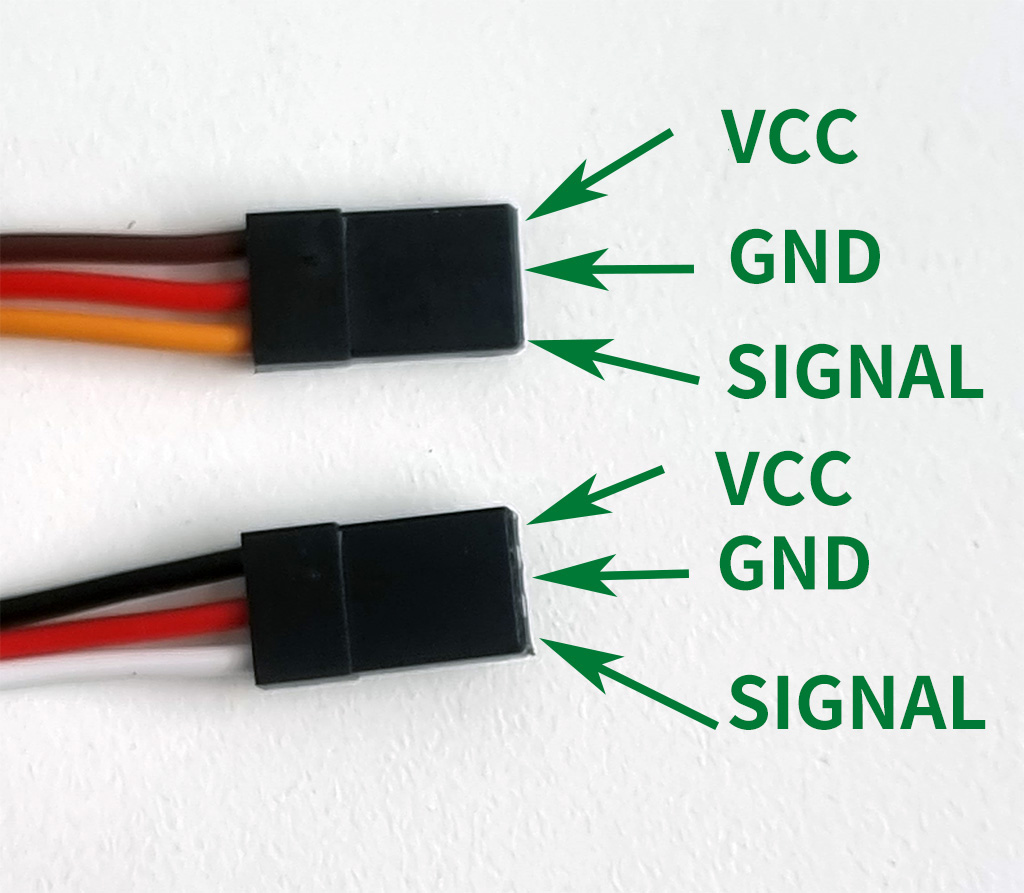
사진을 참조하여 핀의 색상이 일치하도록 연장선과 연결합니다.
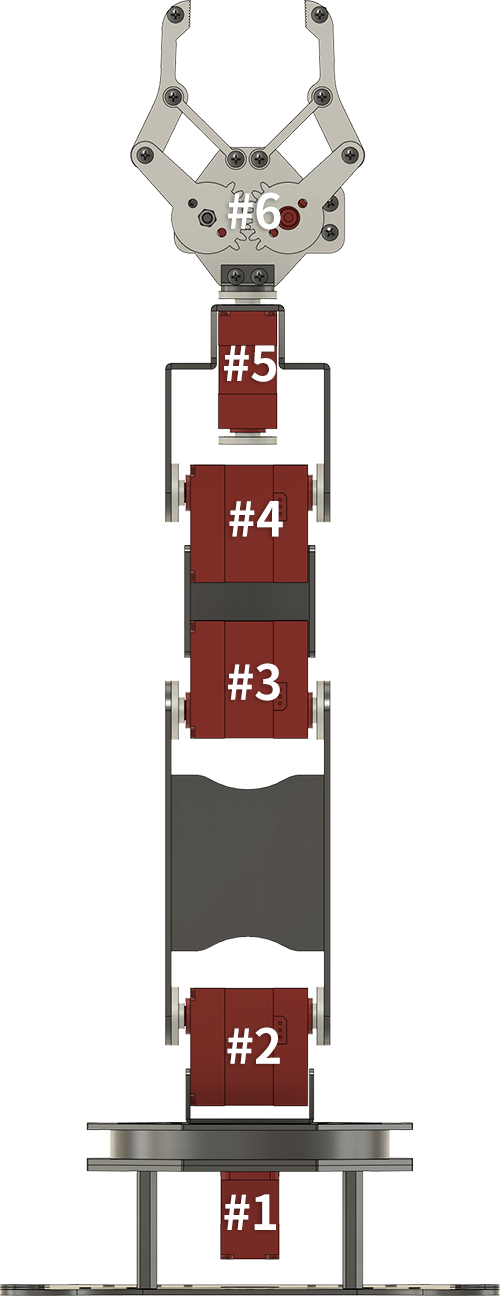
로봇암에는 총 6개의 서보모터가 있으며 결선을 위해 편의상 아래쪽에서 위쪽으로 순차적으로 #1에서 #6까지로 번호를 붙이겠습니다.
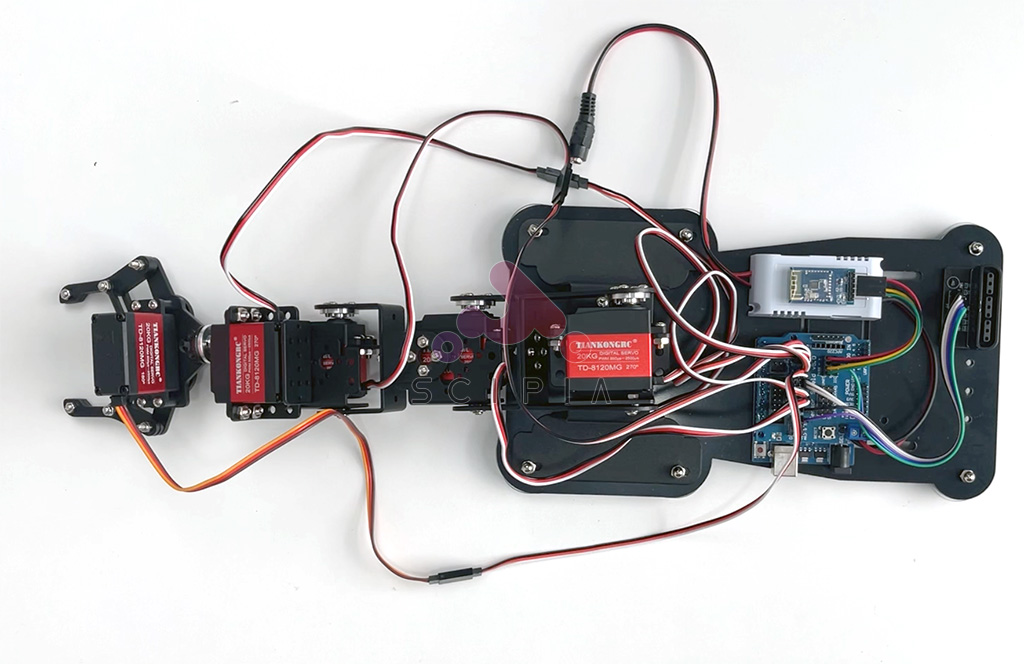
센서보드에 #1부터 #6까지 순서대로 모터 케이블을 꼽아줍니다. 이 때 케이블의 방향에 유의하여 연결하시기 바랍니다.
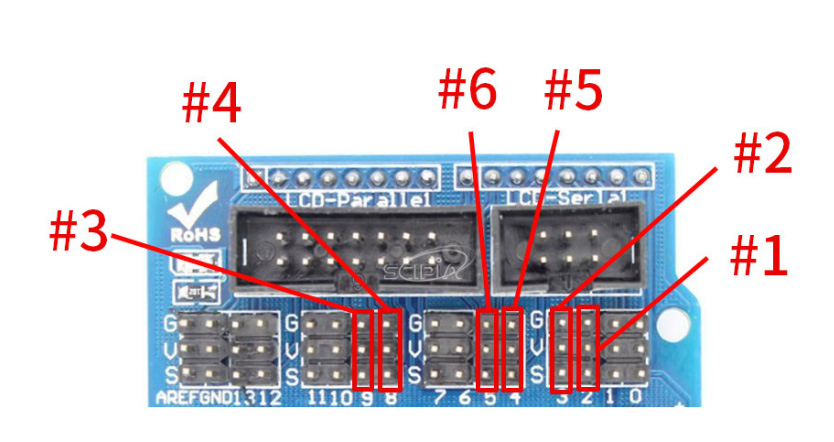
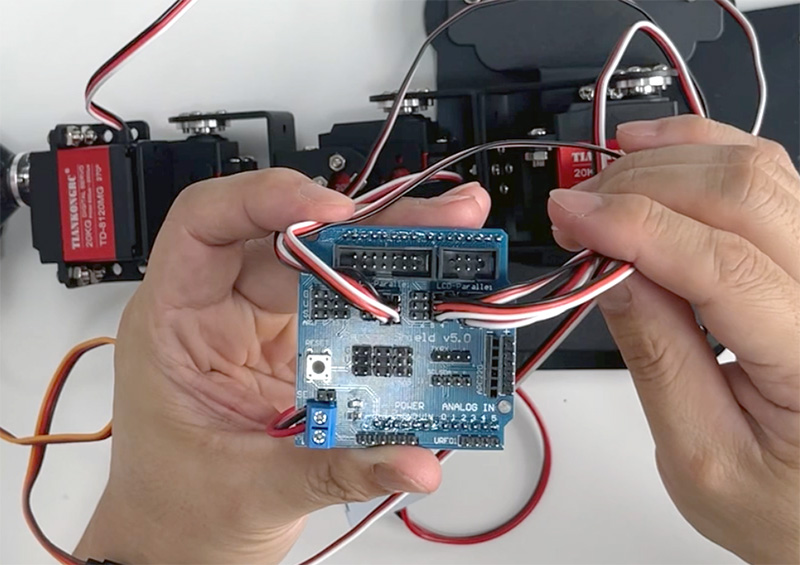
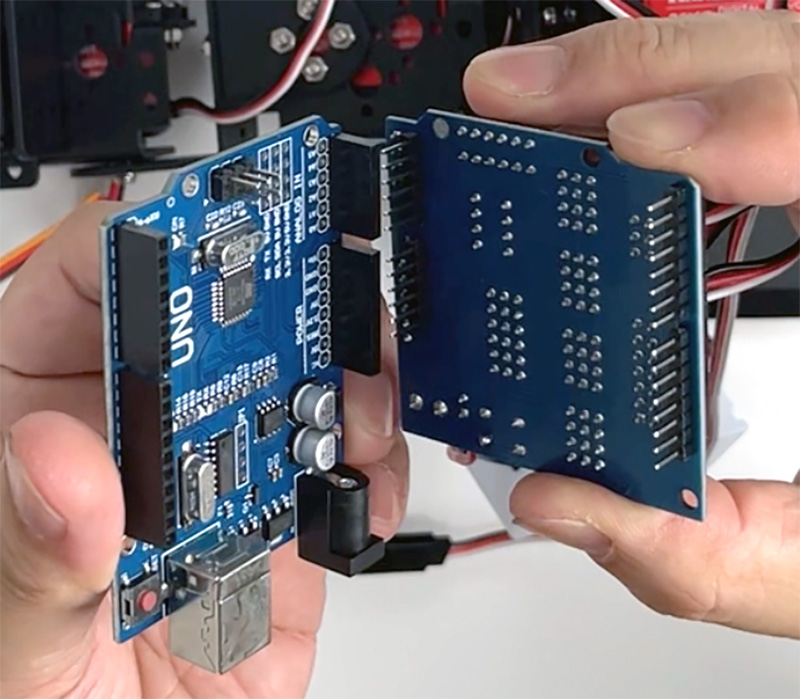
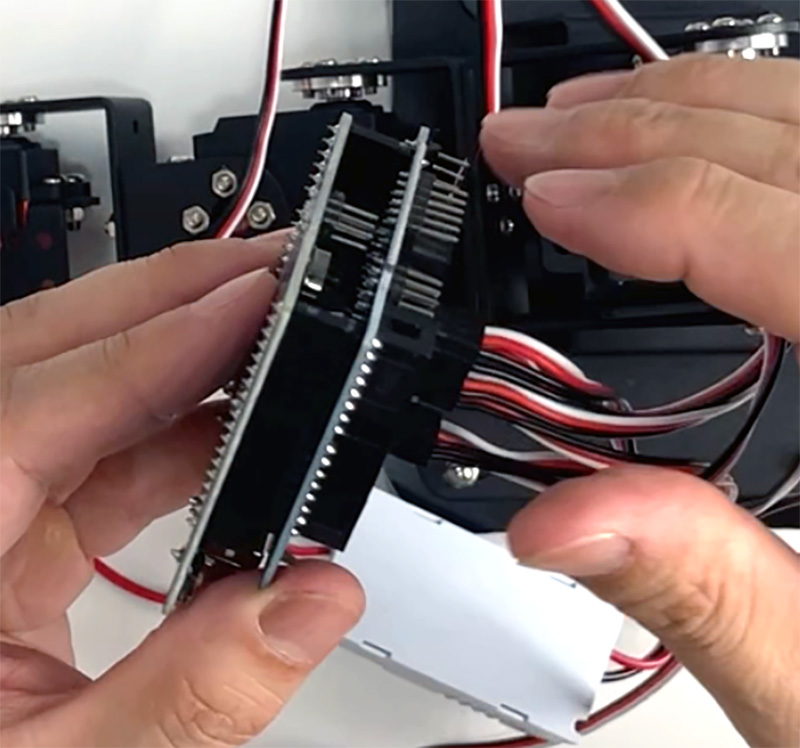
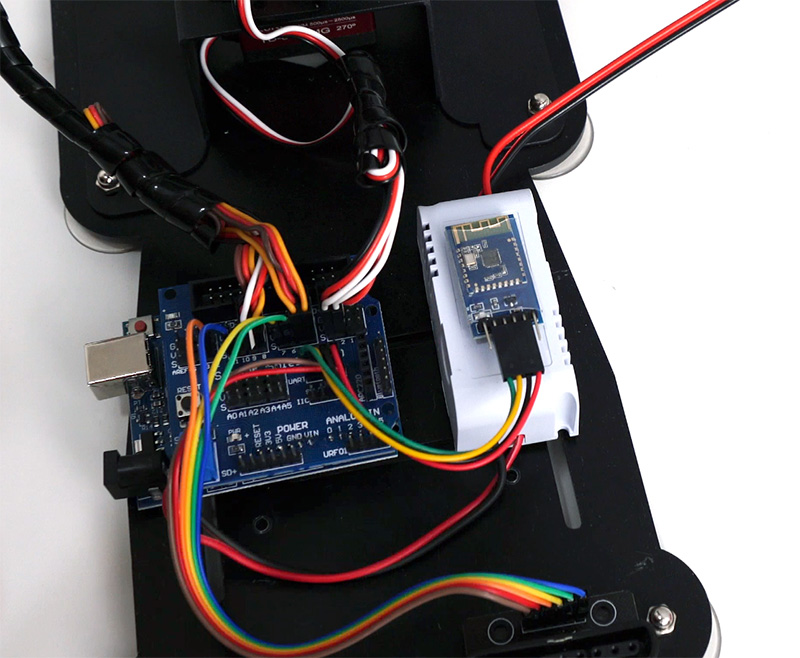
이제 아두이노 우노 보드 위에 센서 쉴드 보드를 올려서 꼽아 줍니다.
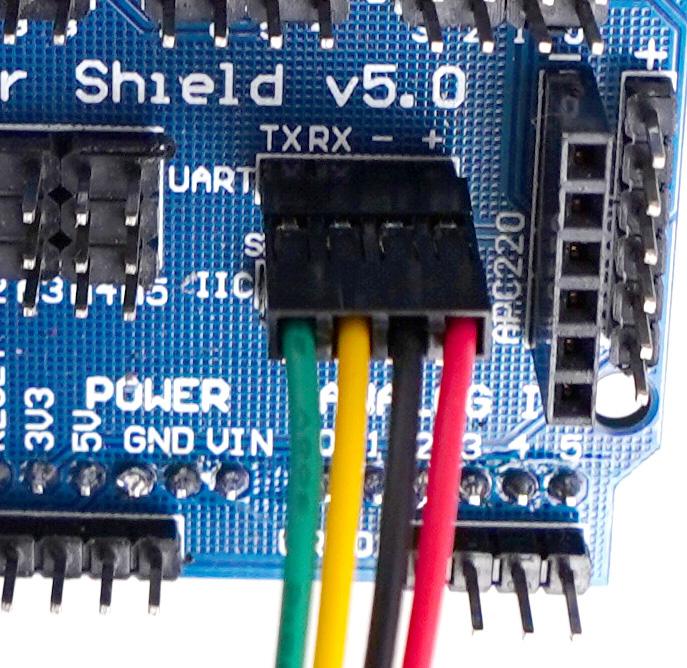
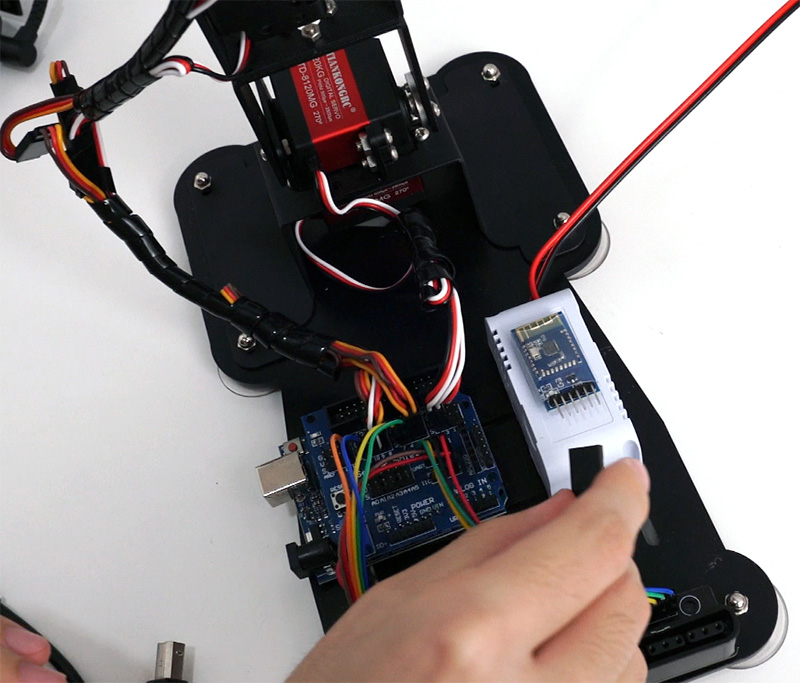
이제 블루투스 모듈을 연결할 차례입니다. 여기서 사용하는 블루투스 모듈은 BLE 4.0이상의 블루투스 시리얼 모듈이며 속도는 115200bps로 설정되어 있습니다.
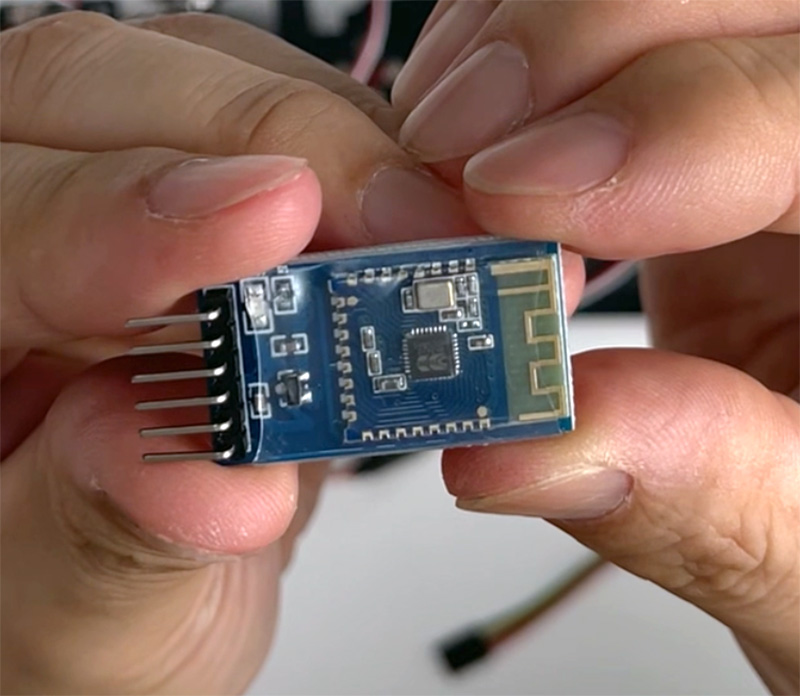
총 6핀 중 VCC, GND, TXD, RXD 이렇게 4핀만 사용하게 됩니다. 4P 케이블을 먼저 블루투스 모듈에 연결한 후 센서쉴드 보드에 +,-,RX,TX 핀에 연결합니다.

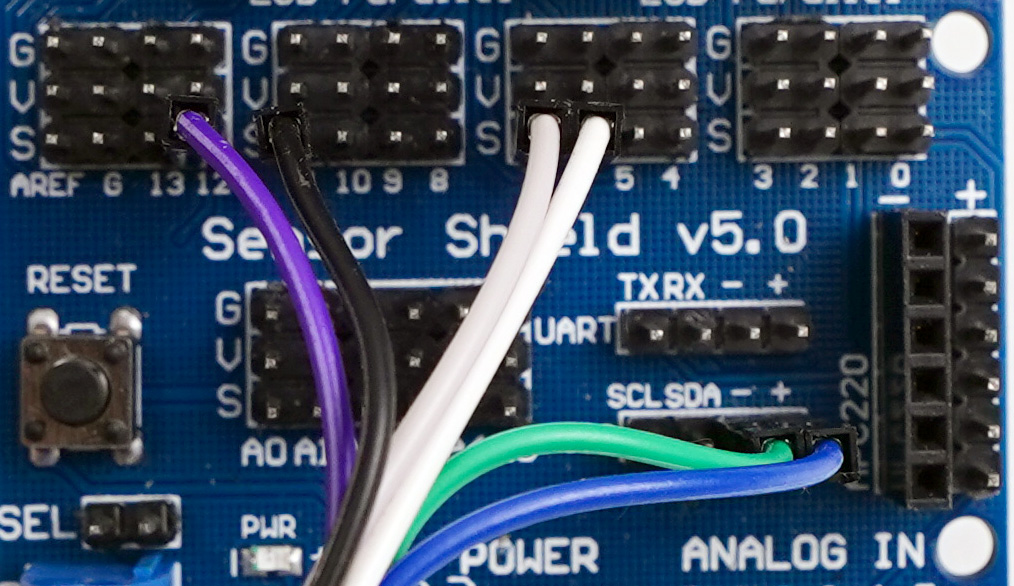
게임패드 무선 수신기 연결 아답터 모듈을 연결할 차례입니다. 아답터 모듈은 무선 PS2 게임패드의 수신기를 아두이노 보드와 연결하기 위한 커넥터모듈입니다.
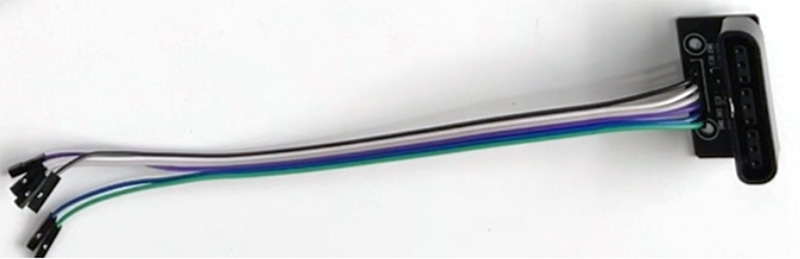
총 6개의 핀을 가지고 있으며 GND와 VCC에 전원을 연결하고 나머지 4개의 핀은 센서쉴드를 통해 아두이노 보드의 각각의 디지털 IO와 연결됩니다.


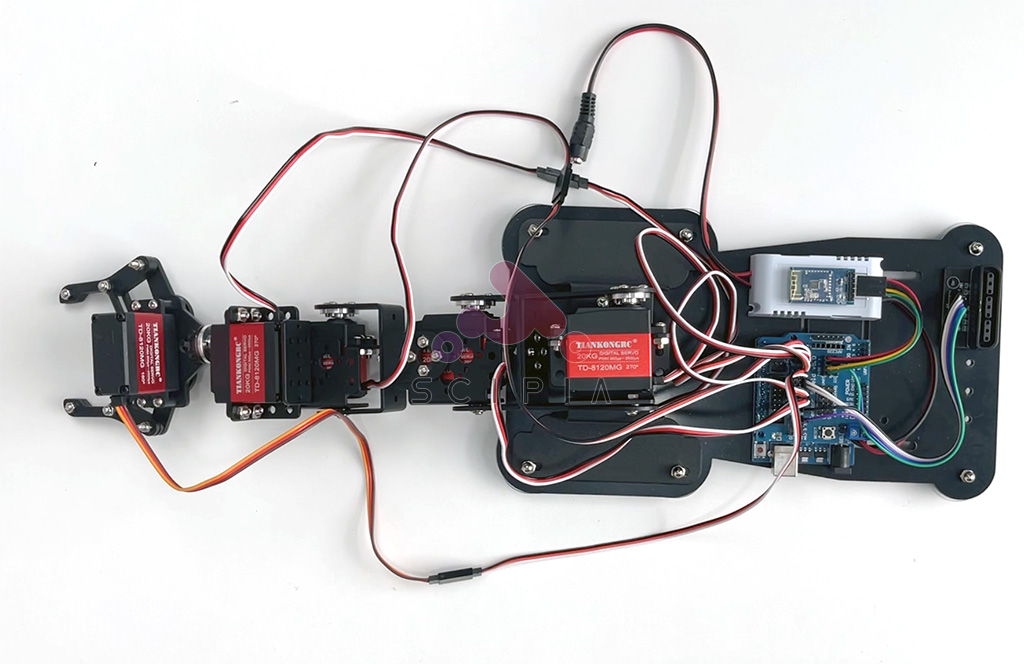
이제 양면 테이프로 각각의 부품을 로봇암의 베이스판에 고정합니다.
3. 프로그램 업로드하고 조작하기
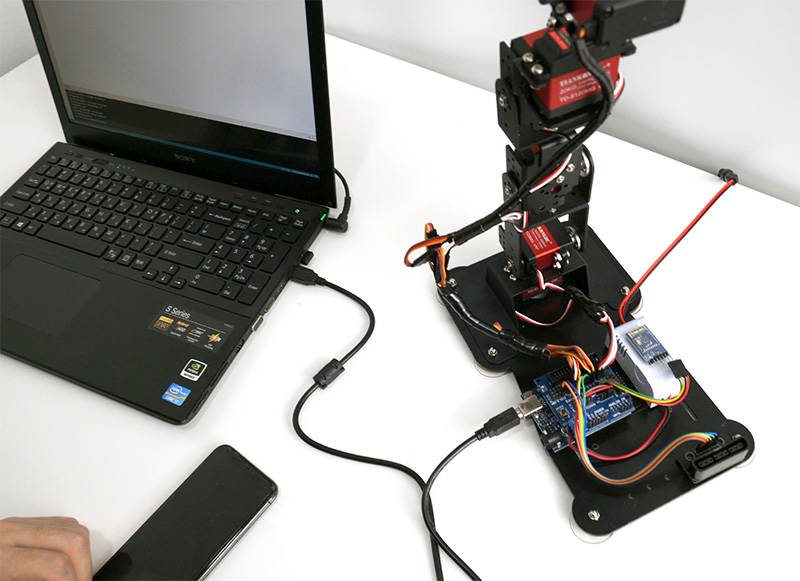
프로그램을 업로드하기 위해서는 먼저 블투투스 모듈과 케이블을 분리합니다. 이는 블루투스 모듈의 TX, RX핀을 데이터 업로드를 위한 시리얼 TX, RX핀과 공유하고 있기 때문에 케이블을 뽑지 않으면 업로드 오류가 발생합니다.
업로드가 끝나면 블루투스 모듈의 케이블을 다시 꼽아줍니다.
앱스토어나 플레이스토어에서 scipia robocon으로 검색하면 앱을 다운로드할 수 있습니다.

다운로드가 끝나고 실행 후 블루투스 권한 등을 허용합니다.
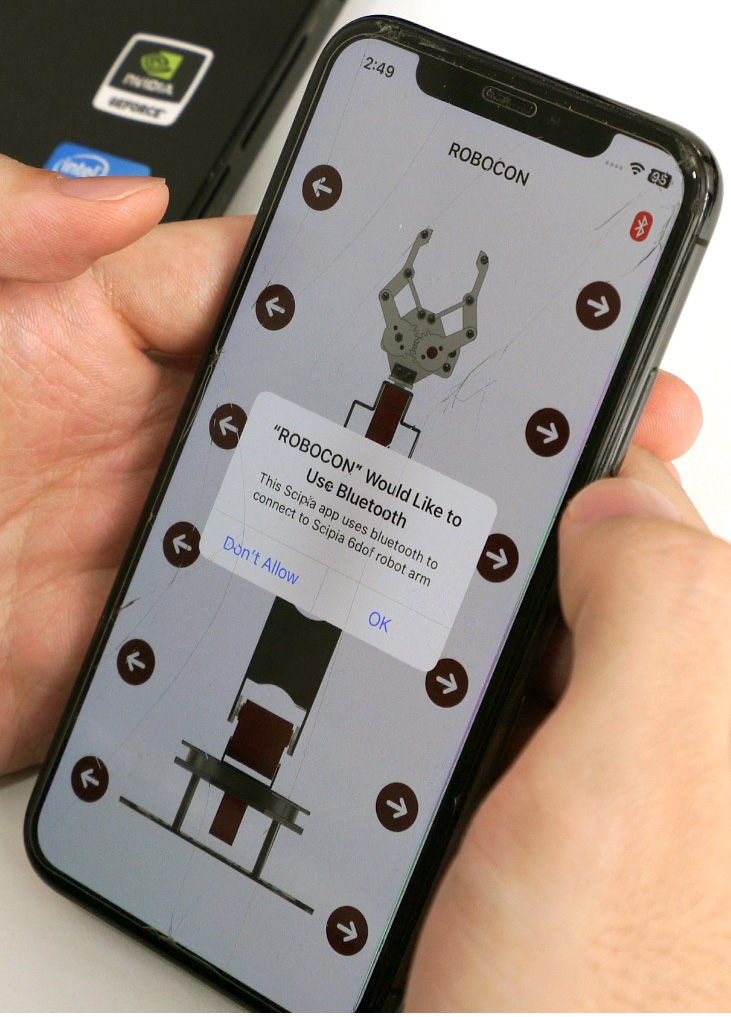
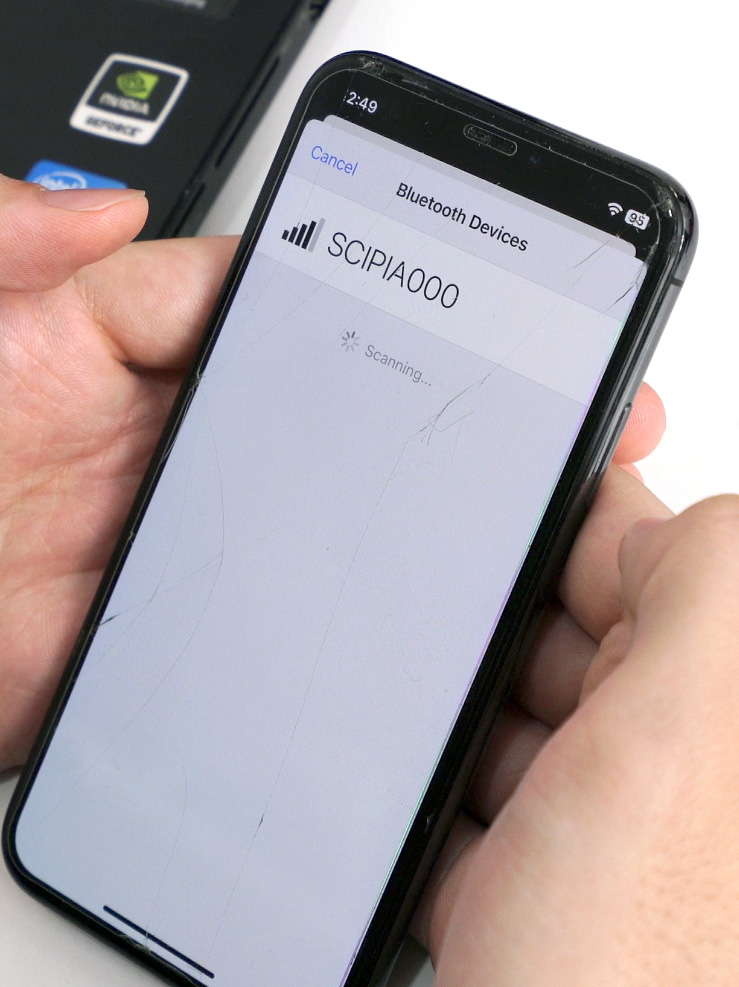
블루투스 아이콘을 클릭한 후 해당 블루투스 모듈을 선택하면 연결됩니다.

게임패드 무선 리시버를 아답터 모듈에 꼽고 게임패드 전원을 켜면 리시버의 2개 LED가 모두 켜지며 연결이 됩니다.

Author

scipia
싸이피아