ROBOCON R1 & 로보콘 보급형 6자유도 로봇팔 바디 조립 매뉴얼
싸이피아(SCIPIA) 로보콘(ROBOCON) R1 로봇팔 조립 튜토리얼 입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 심플한 구조와 대형 흡착판 사용으로 조작 편의성을 증대하였습니다.
서보모터 구성품만 다른 두 가지의 제품 구성이 있습니다. 조립방법은 동일합니다.
로보콘 보급형의 경우 동일한 서보모터 이므로 순서에 관계없이 서보모터를 결합하면 됩니다.
ROBOCON R1은 경우는 서보모터의 번호에 따라 조립위치가 달라집니다. 조립 시 유의하시기 바랍니다.
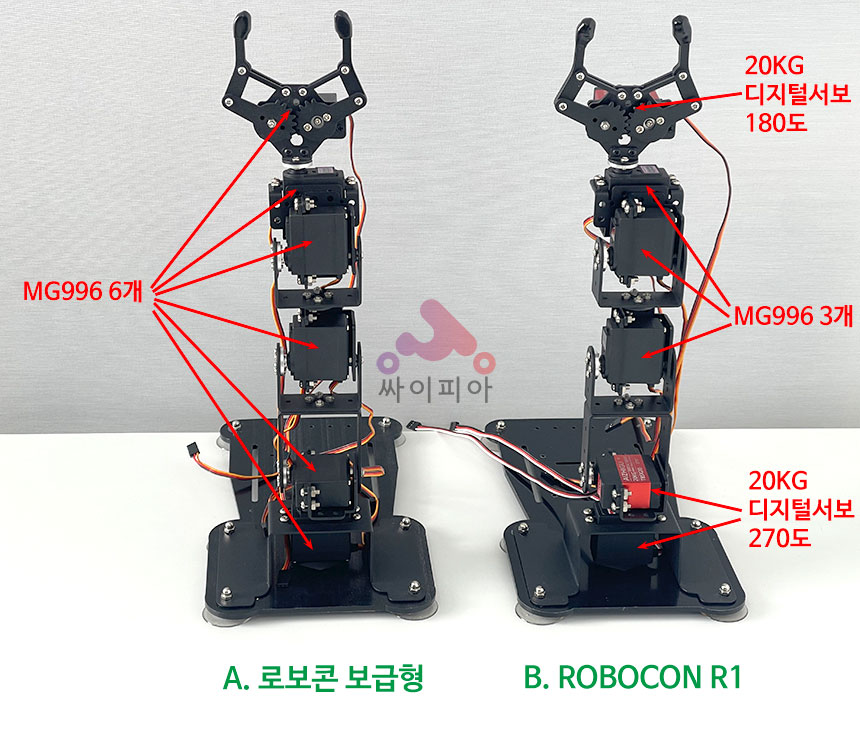
로보콘 보급형은 MG996 아날로그 서보 6개로 구성되며 ROBOCON R1은 디지털 서보모터 3개와 MG996 서보 3개로 구성됩니다. 서보모터를 제외한 기타 구성품은 동일합니다.
다음은 로보콘 보급형 구성품입니다.

다음은 ROBOCON R1 구성품입니다.

1. 따라하기 조립 동영상 (YOUTUBE)
2. 조립 튜토리얼
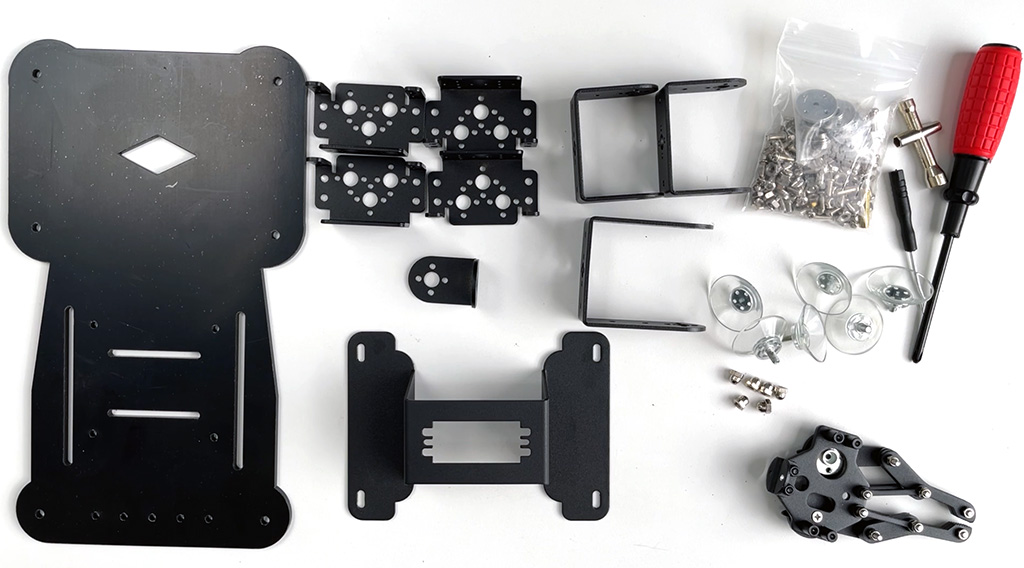
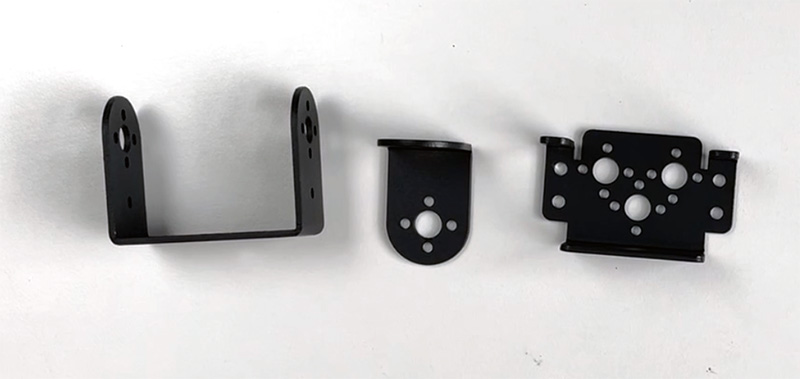
아래는 서보모터를 제외한 실제 부품 구성입니다.
6자유도 로봇이므로 총 6개의 서보모터가 필요합니다. 로보콘 보급형은 6개의 MG996서보모터가 있으며 순서에 관계없이 조립하면 됩니다. ROBOCON R1의 경우는 서보모터의 번호 순서에 맞게 조립해야 합니다.
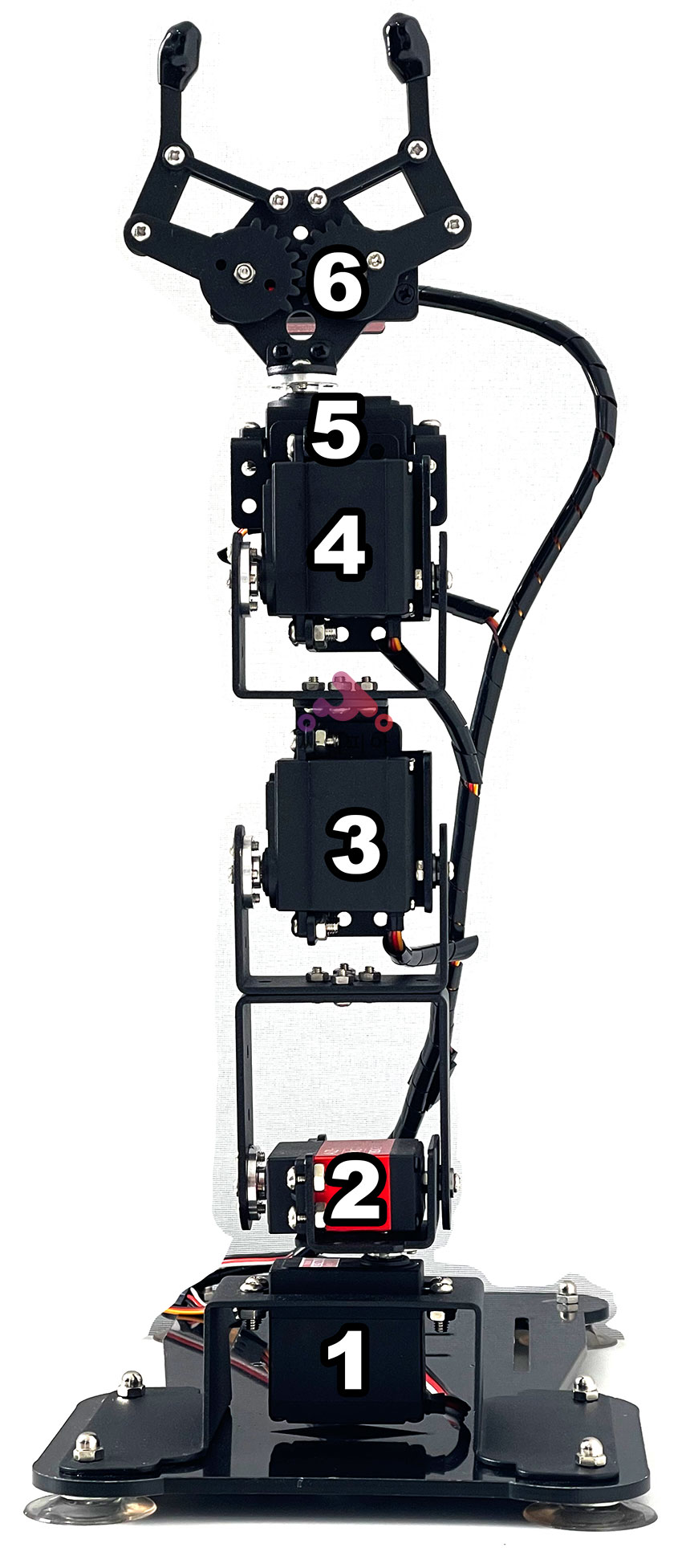
ROBOCON R1의 경우 270도 디지털서보 2개(1번, 2번), 180도 디지털서보(그립퍼용; 6번), MG996 서보 3개(3번, 4번, 5번)가 사용됩니다.


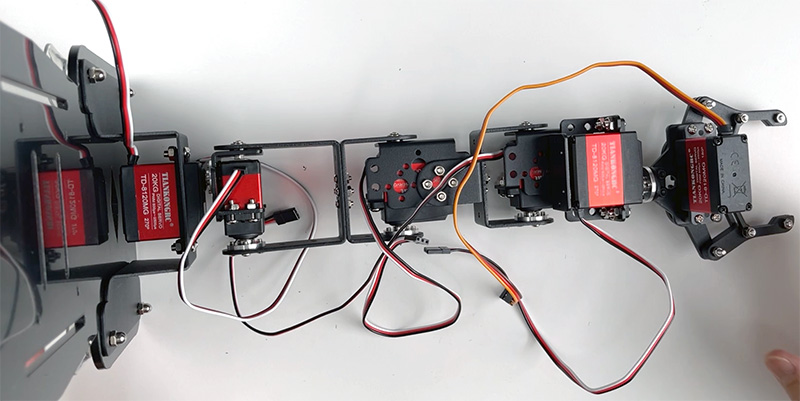
아래는 ROBOCON R1의 경우에 부착되는 서보모터의 번호입니다. 아래에서 부터 순차적으로 1에서 6번까지 조립됩니다.
서보모터는 조립전 회전각을 모두 중앙에 오도록 세팅해 주어야 합니다.
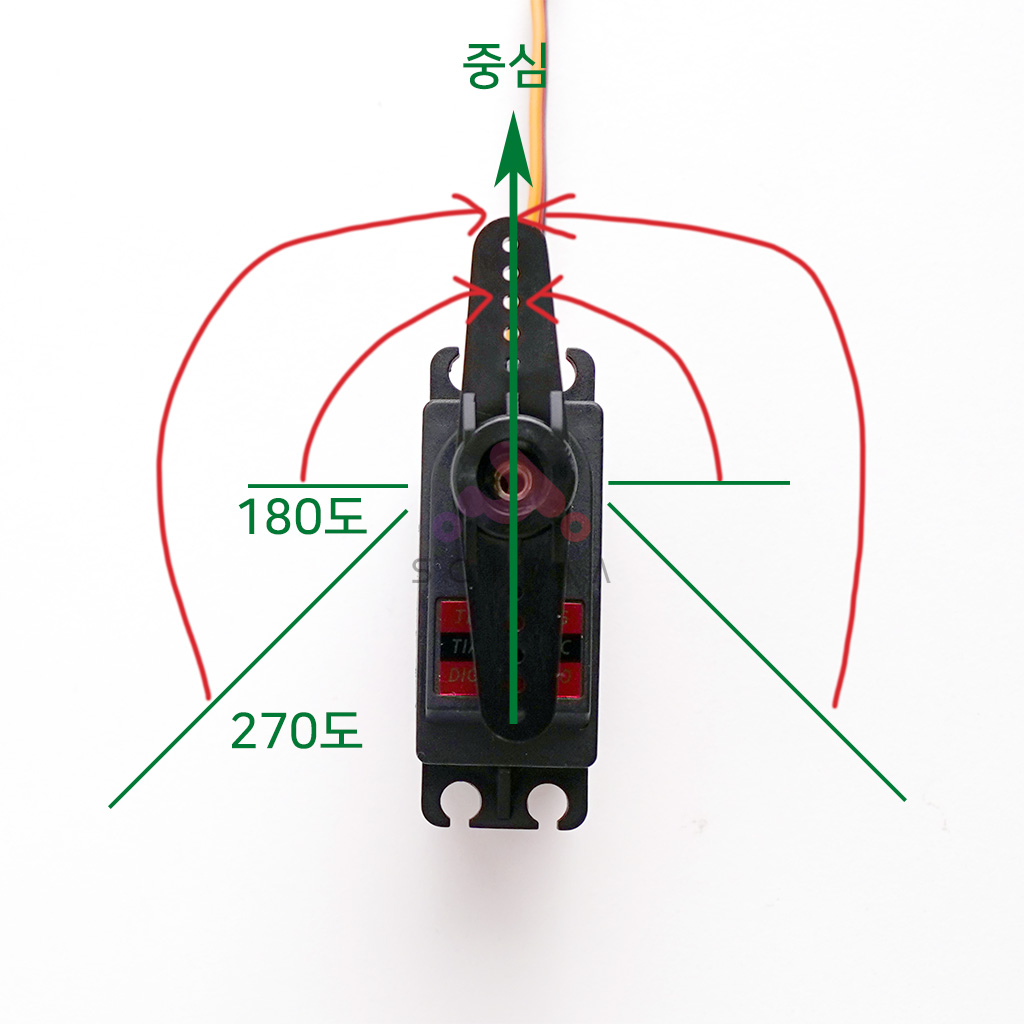
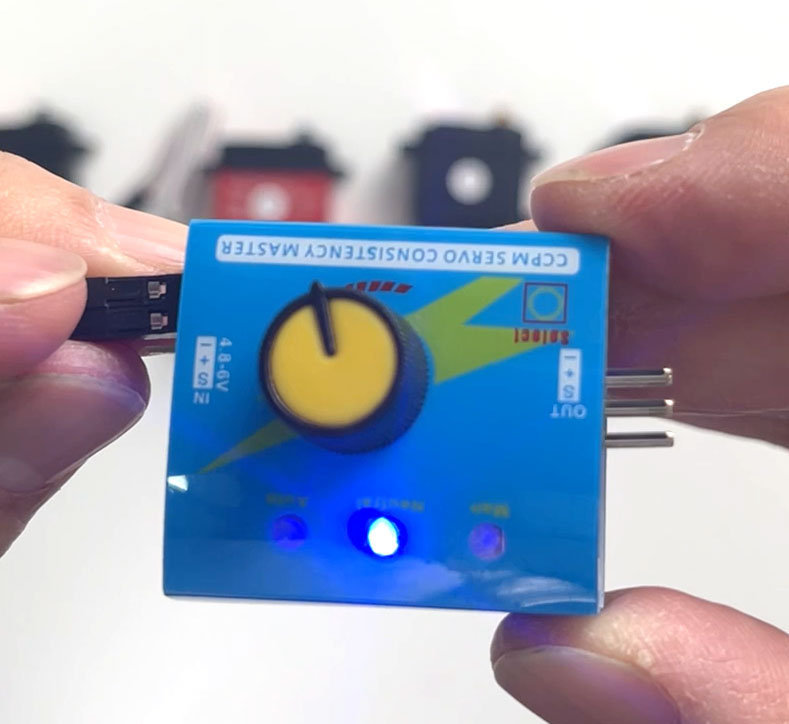
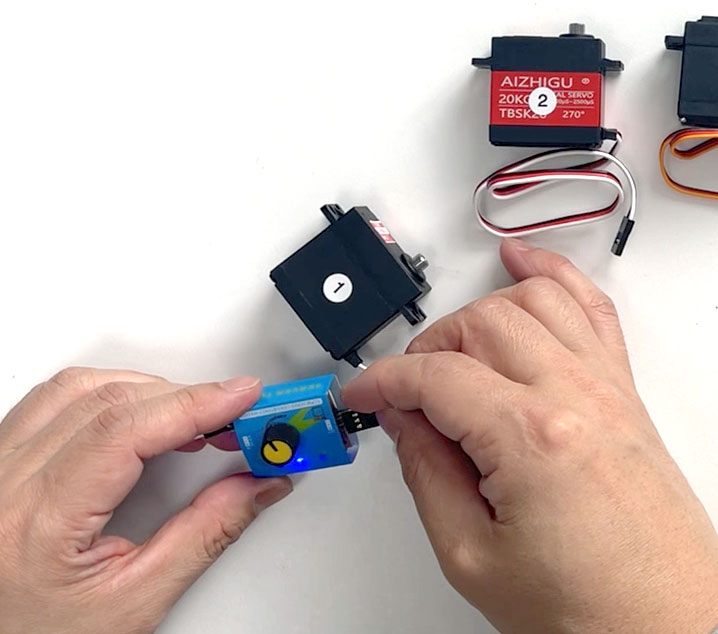
서보모터 테스터가 있는 경우 서보모터 테스터에 서보모터를 연결한 후 센터 이동 스위치(NEUTRAL)를 누르면 서보모터가 중앙으로 이동합니다.
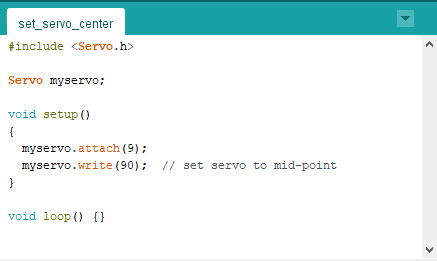
서보모터 테스터가 없는 경우에는 아두이노보드에 서보모터를 센터로 이동하도록하는 프로그램을 업로드한 후 각각의 서보모터를 연결하면 연결된 서보모터가 중앙으로 이동하게 됩니다.
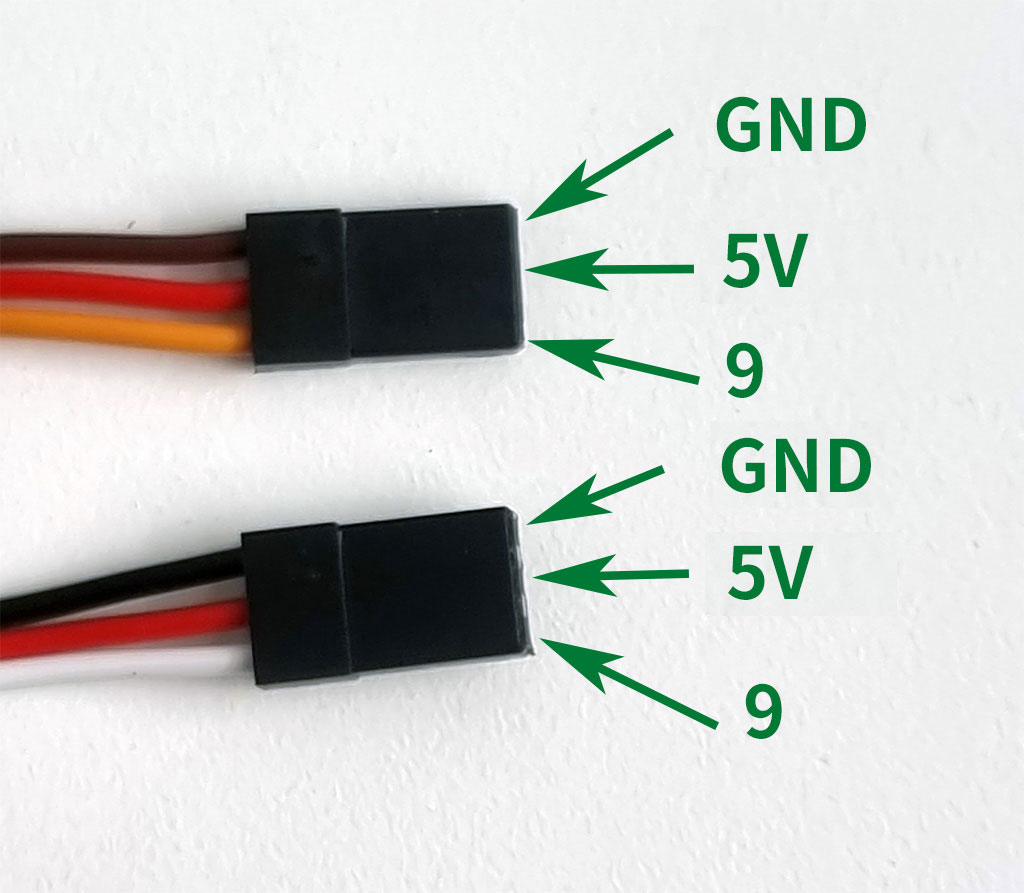
아래는 서보모터를 중앙으로 이동하게 하는 아두이노 프로그램 소스입니다. 아두이노 보드에 업로드 하고 아래 핀맵에 맞게 서보모터와 연결하면 서보모터가 센터로 이동합니다.
#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
myservo.write(90); // set servo to mid-point
}
void loop() {}
U타입 브라켓 짧은 것 1개와 긴 것 1개를 준비하고 이렇게 붙여줍니다.
M3x8 나사와 M3볼트 4개를 사용합니다,



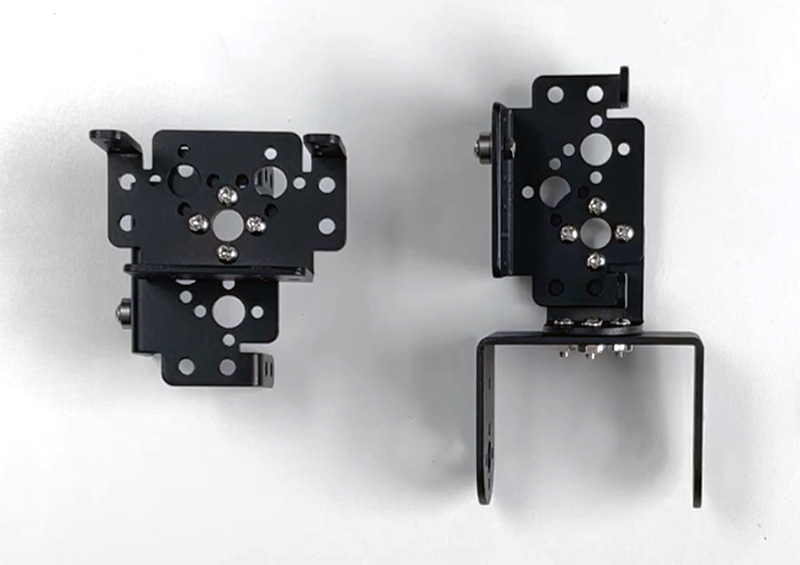
짧은 U브라켓 1개, L브라켓 1개, 멀티펑션브라켓 1개를 준비합니다.
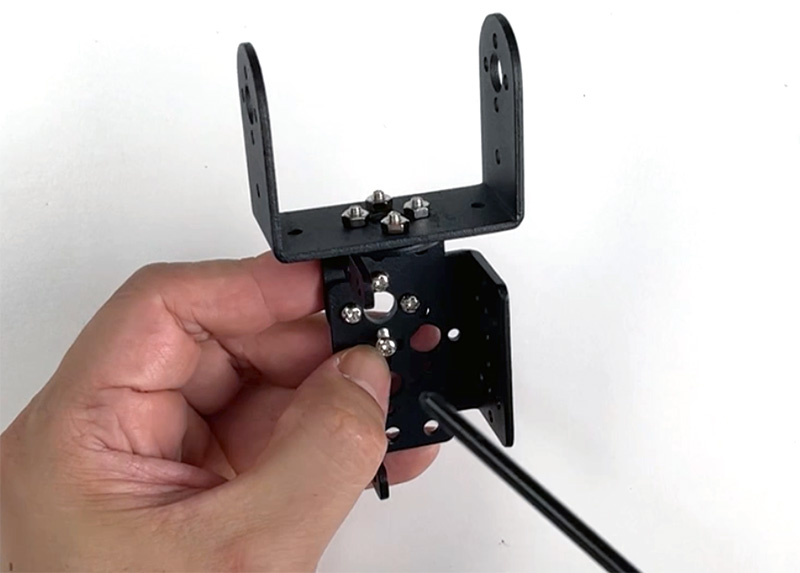
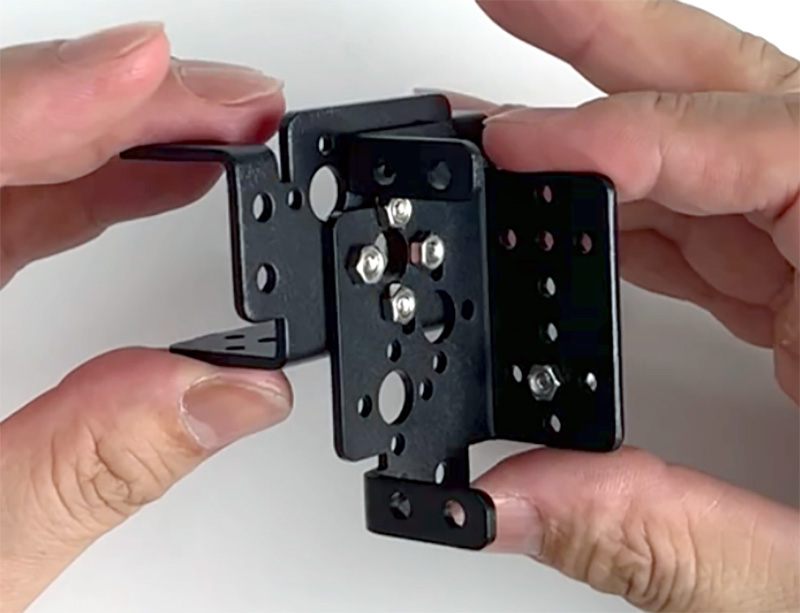
U브라켓과 L브라켓을 먼저 조립합니다. M3x8볼트를 사용합니다.조립이 끝나면 그 위에 멀티펑션브라켓을 조립합니다. 이 때 방향과 위치를 확인하시기 바랍니다. 여기도 M3x8 볼트를 사용합니다.

다음은 플랜지베어링을 M3x8 볼트와 너트로 고정합니다. 이 때 방향과 위치를 확인하시고 플랜지가 브라켓쪽으로 향하도록 합니다.



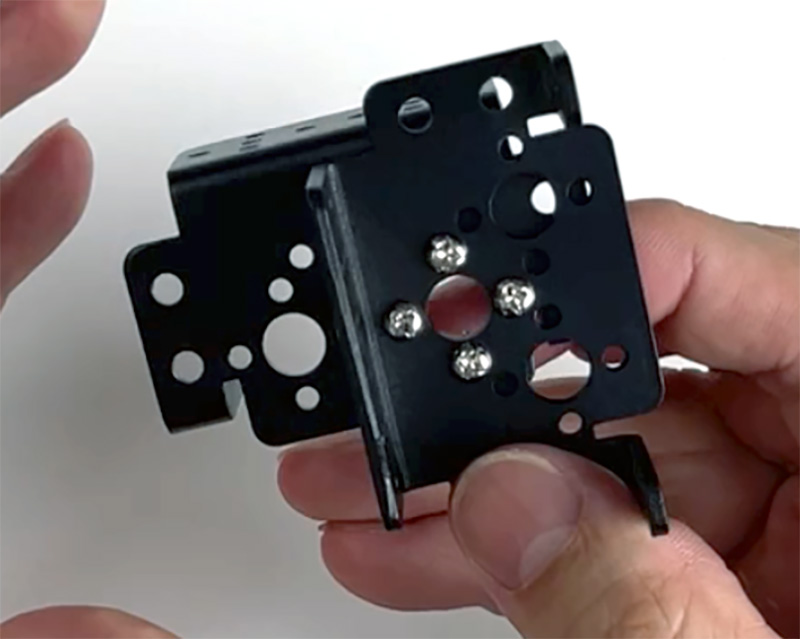
다음으로 멀티펑션브라켓 2개를 결합합니다. 이번에는 M3x6 볼트를 사용해야 합니다. 결합되는 브라켓의 방향과 체결 위치를 주의하시기 바랍니다.

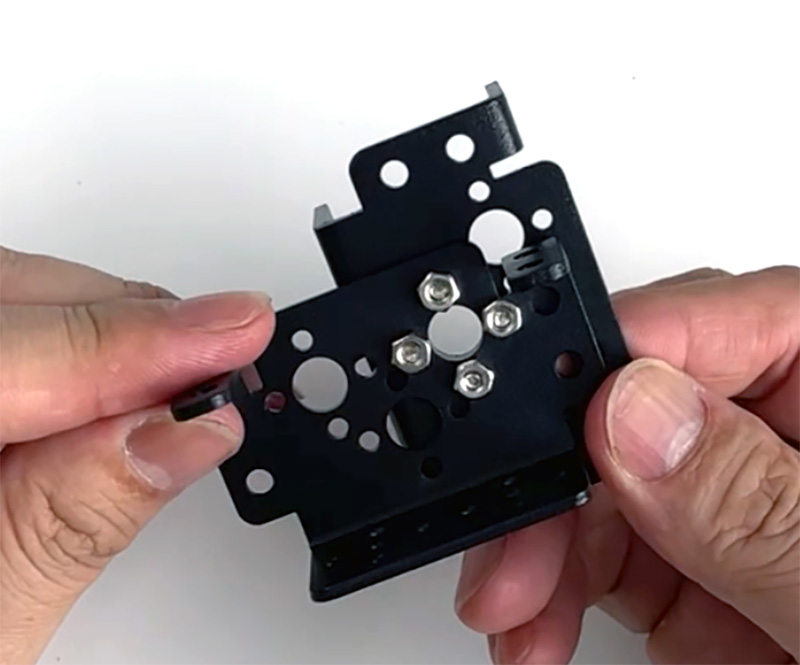
이제 플랜지베어링을 M3x8볼트로 브라켓에 부착합니다. 이때 플랜지가 브라켓으로 향하도록 합니다.
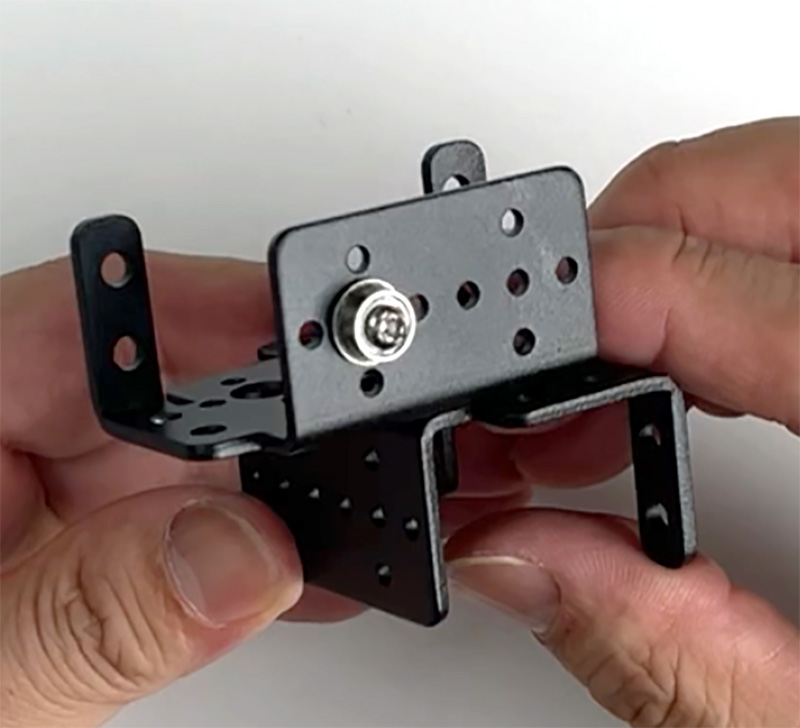
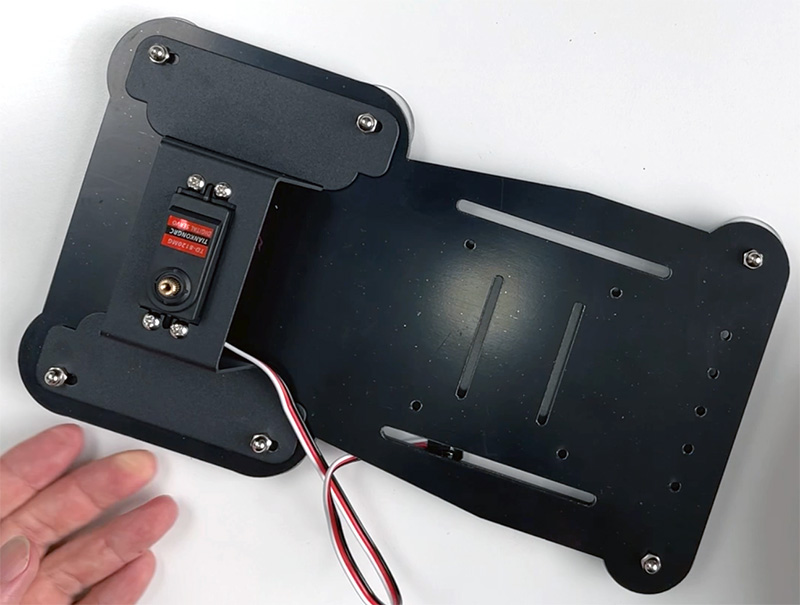
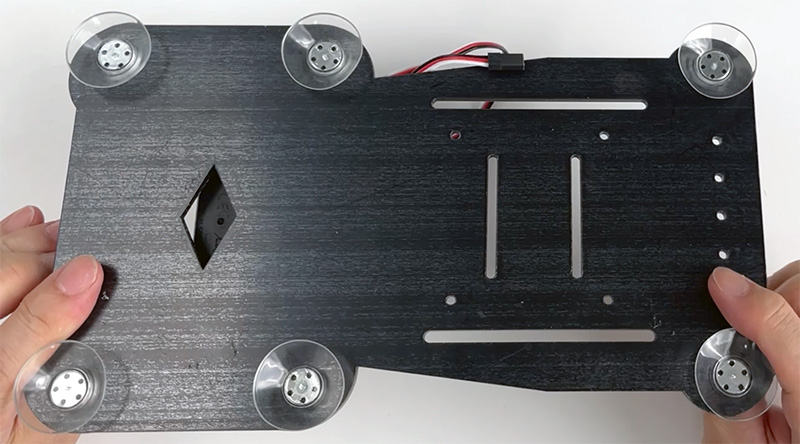
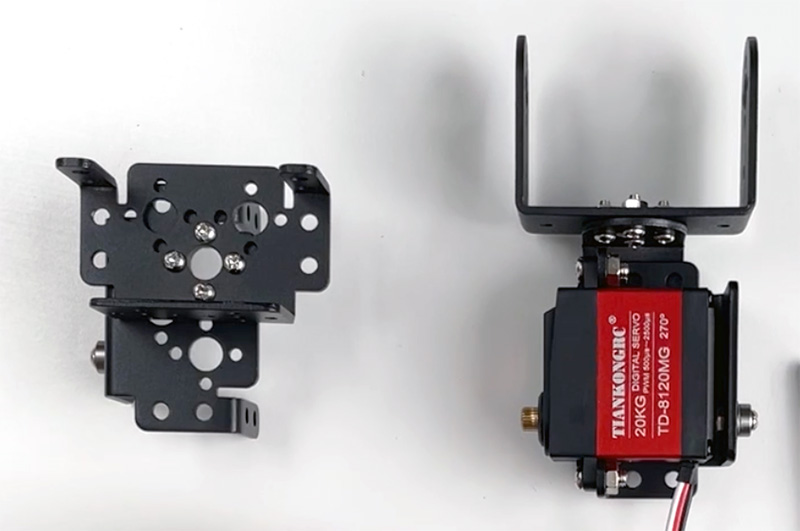
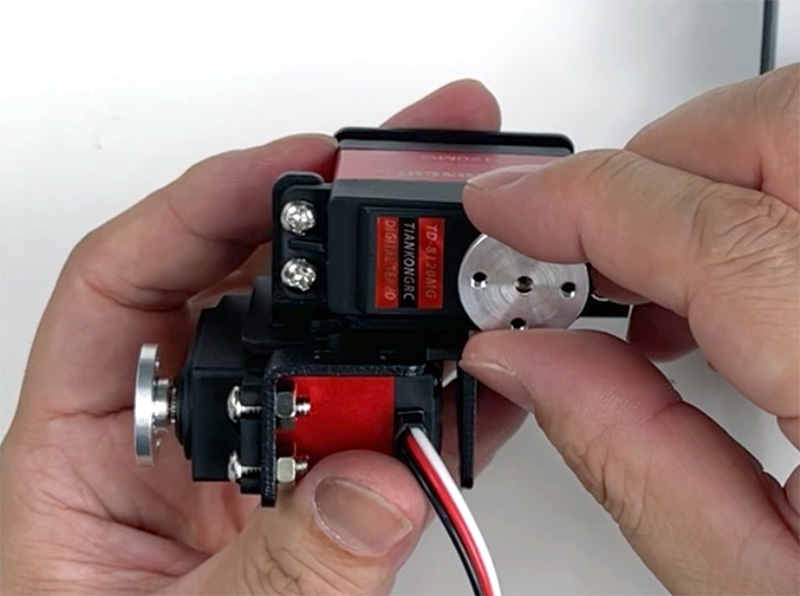
이제 축회전 브라켓을 베이스판에 부착하기 전에 먼저 서보모터(1번)를 먼저 브라켓에 부착합니다. M4x10 볼트와 M4너트를 사용합니다.

이 브라켓을 베이스판에 부착할 때는 흡착판 볼트와 너트를 사용합니다. 브라켓을 베이스판에 부착시 서보모터의 방향에 유의하시기 바랍니다.
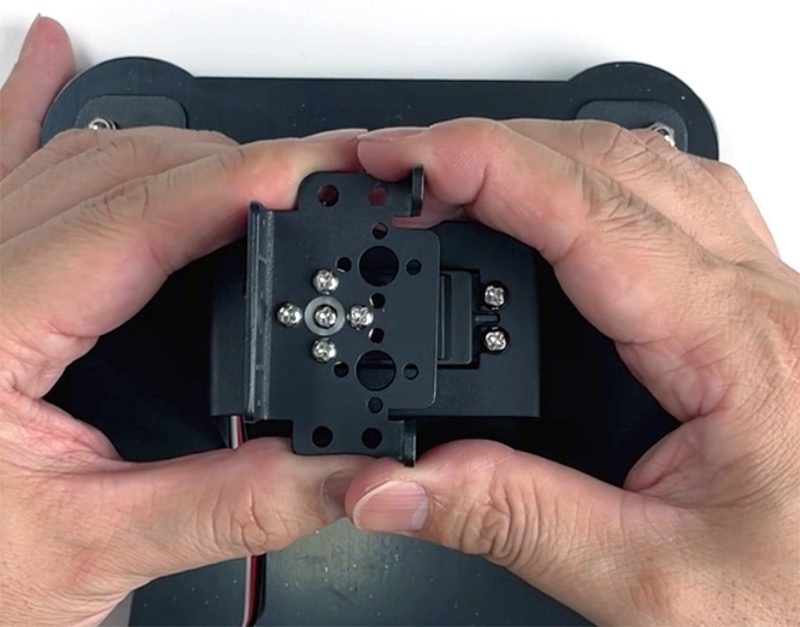
이제 서보혼 디스크를 서보모터 회전축 톱니에 부착합니다. 이 때 모터 수평면과 디스크 홀이 십자로 직각이 되도록 합니다.

이 위에 멀터펑션 브라켓을 올려서 조립합니다. M3x6 볼트를 사용하며 가운데 축 홀에도 M3x6 볼트로 고정합니다. 여기서 너트는 필요하지 않습니다.
플랜지 베어링을 M3x8볼트와 너트로 브라켓에 부착합니다.
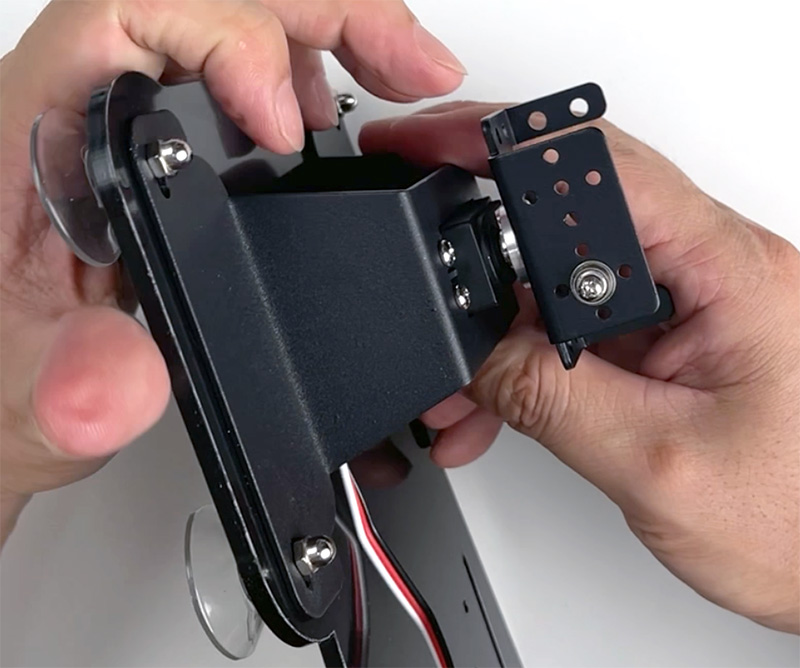
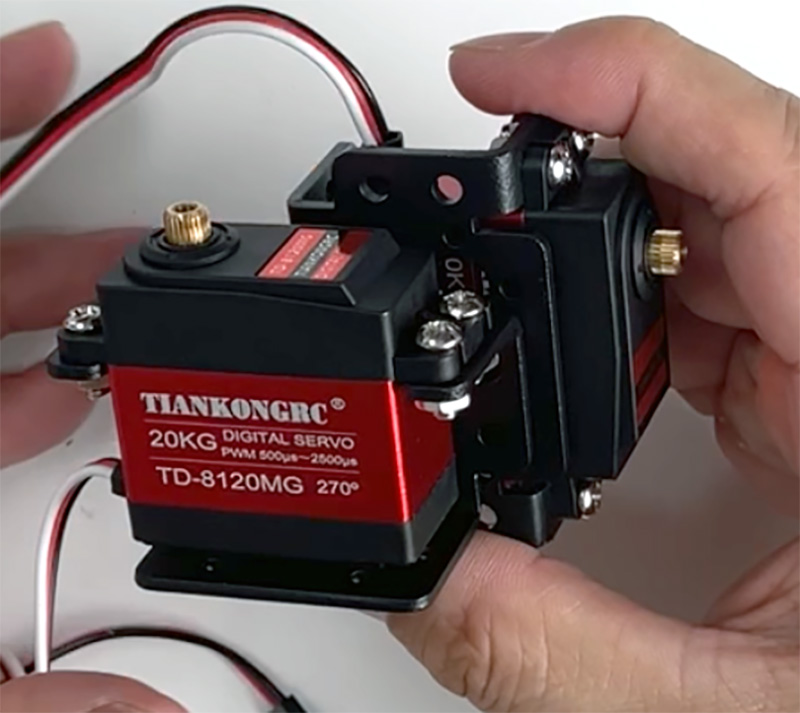
서보모터(2번)를 브라켓에 고정합니다. 이 때 회전축 방향이 베어링의 위치와 일자가 되도록 합니다. 고정시 M4x10 볼트 너트를 사용합니다.
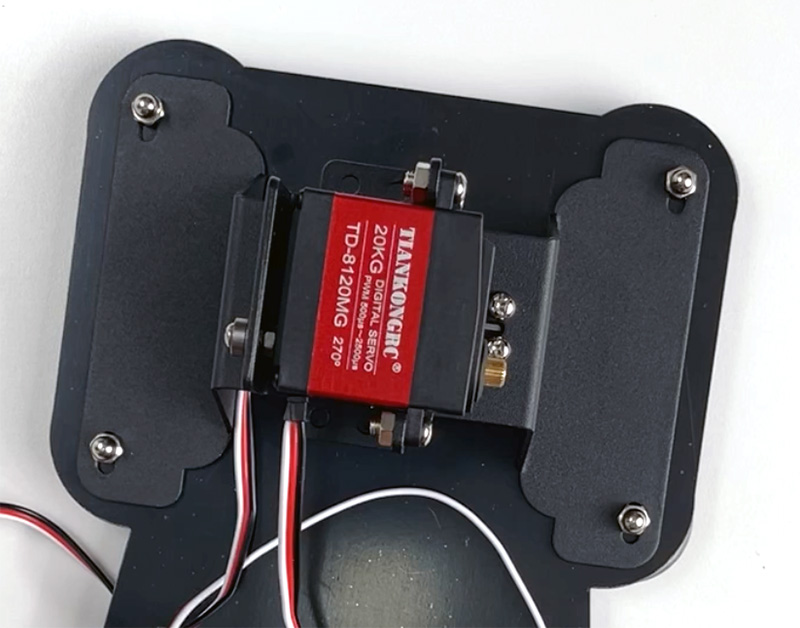
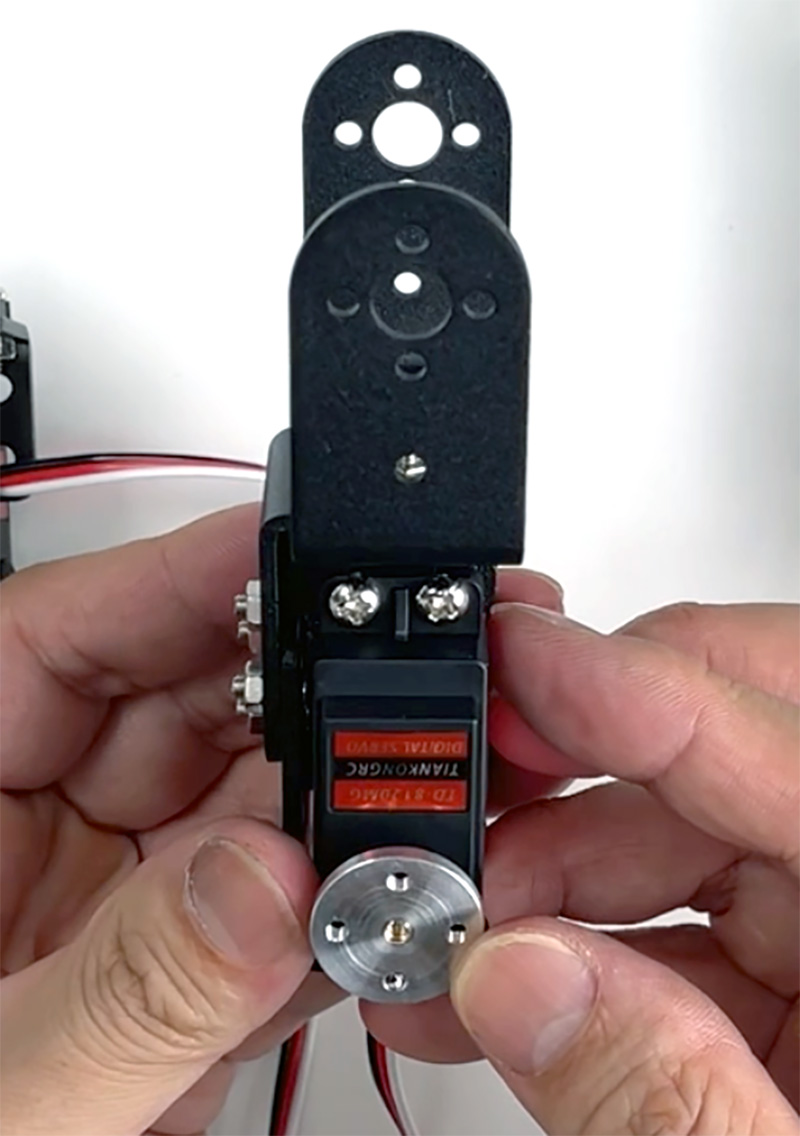
서보모터 회전축 톱니에 서보혼 디스크를 부착합니다. 이 때 디스크 홀이 십자모양으로 모터 수평면과 직각을 이루도록 합니다.

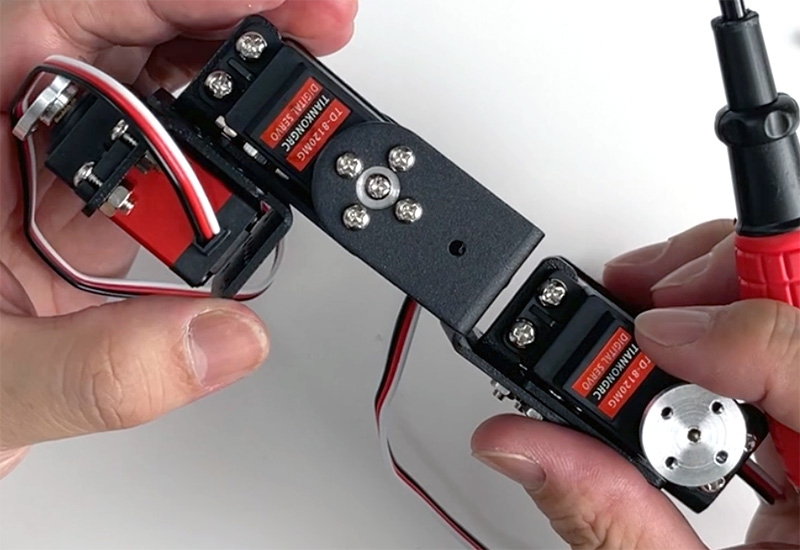
앞서 조립한 브라켓 2종을 가져와 2차조립을 시작합니다.
서보모터(3번)를 부착하고 M4x10 볼트와 너트로 고정합니다. 이 때 서보모터의 회전축 방향이 부착된 베어링과 일자가 되도록 합니다.
다른 쪽에는 2개의 서보모터(4번, 5번)가 부착되게 됩니다. 동일한 방법으로 합니다.

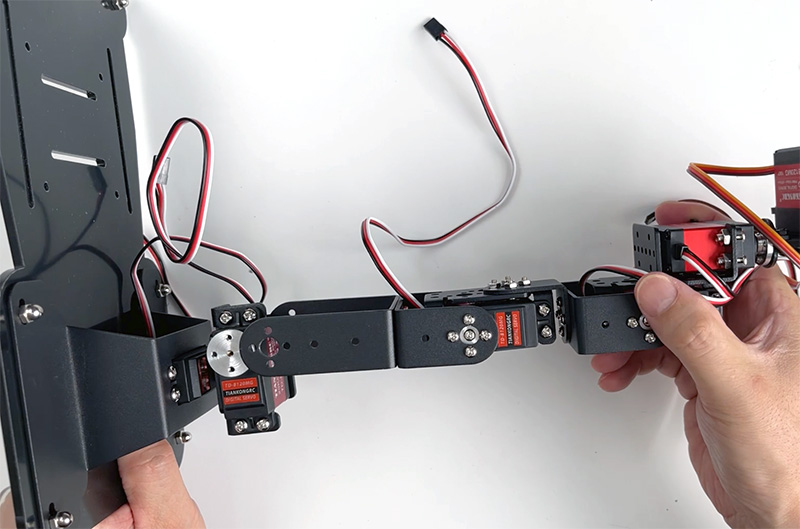
이제 모든 브라켓을 하나로 조립할 차례입니다.

먼저 서보혼 디스크를 앞서와 같은 방법으로 모든 서보모터 톱니에 고정합니다.
다음으로 한쪽 브라켓을 다른 브라켓 회전축과 결합합니다. 이 때는 베어링을 브라켓의 홀에 넣으면서 밀어주면 되며 이 때 살이 씹힐 수 있으니 다치지 않도록 주의하시기 바랍니다.
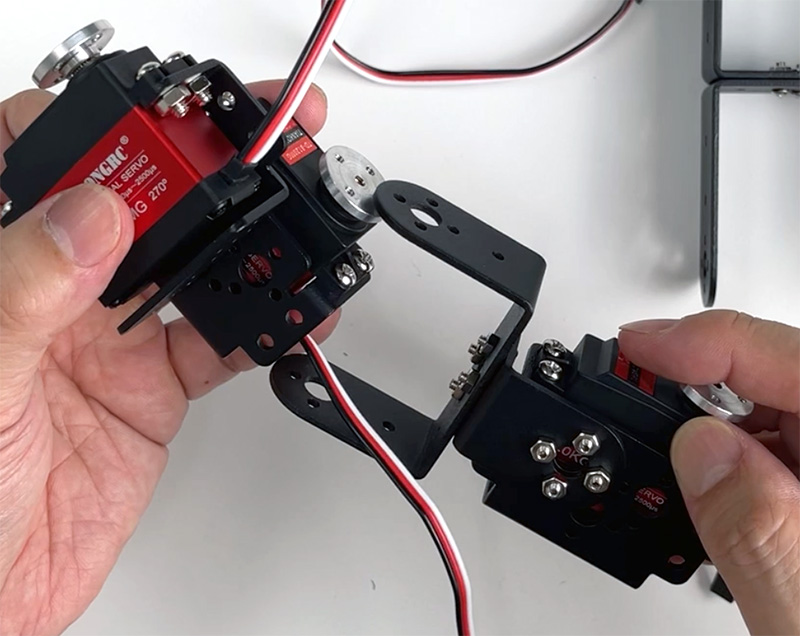
브라켓과 서보혼 디스크와의 결합은 M3x6 볼트로 합니다.

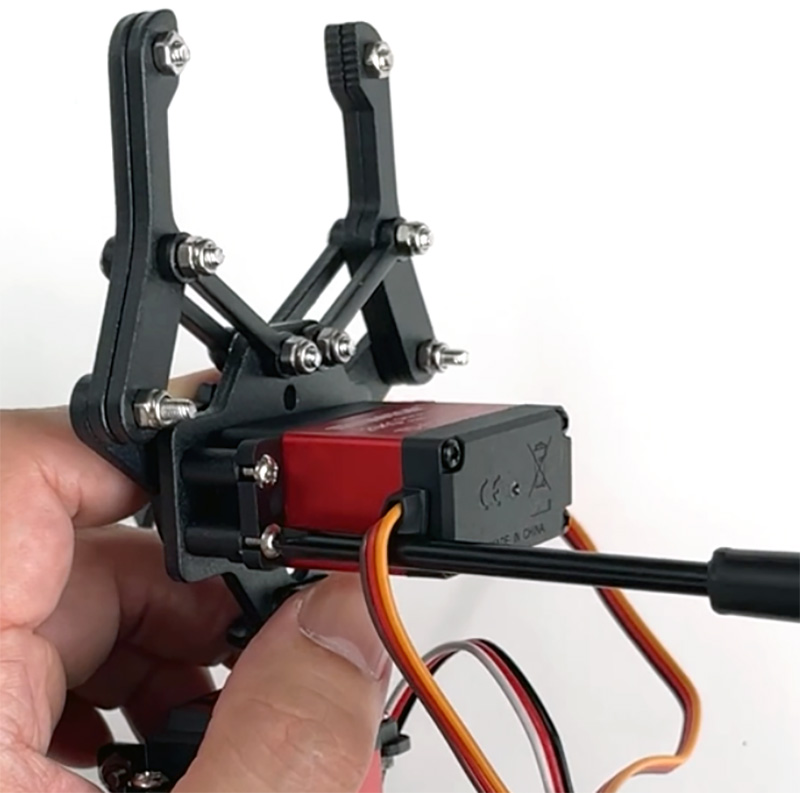
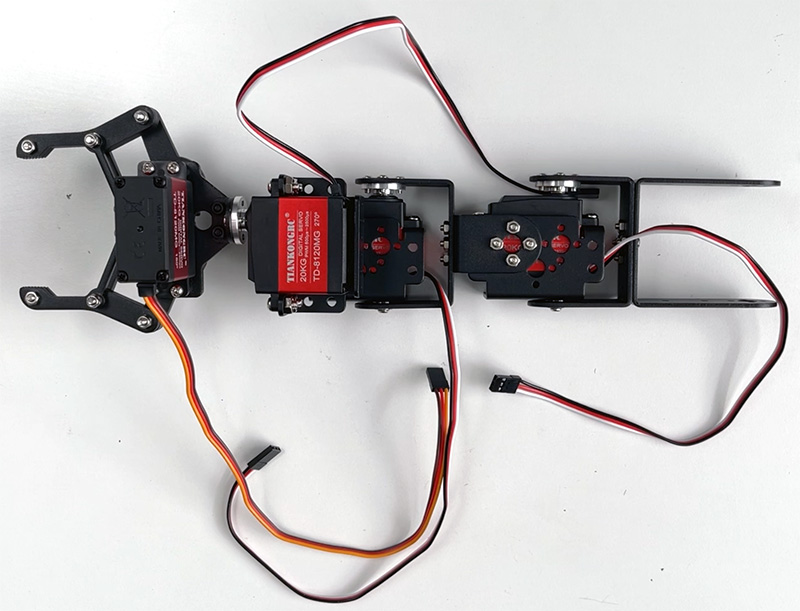
이제 그립퍼를 부착할 차례입니다. 먼저 M3x6볼트로 디스크를 서보모터에 고정합니다.

그립퍼를 디스크에 올리고 양쪽을 M3x6 볼트로 체결합니다. 이 때 한쪽을 느슨하게 조립한 후 나중에 한꺼번에 조여주는 것이 좋습니다.

그립퍼에 서보모터(6번)를 조립합니다. 이 때 그립퍼는 반정도 벌어진 상태가 되도록 하며 이번에는 M3x8 볼트로 고정합니다.

디스크와 서보모터는 M3x6 볼트로 고정합니다.

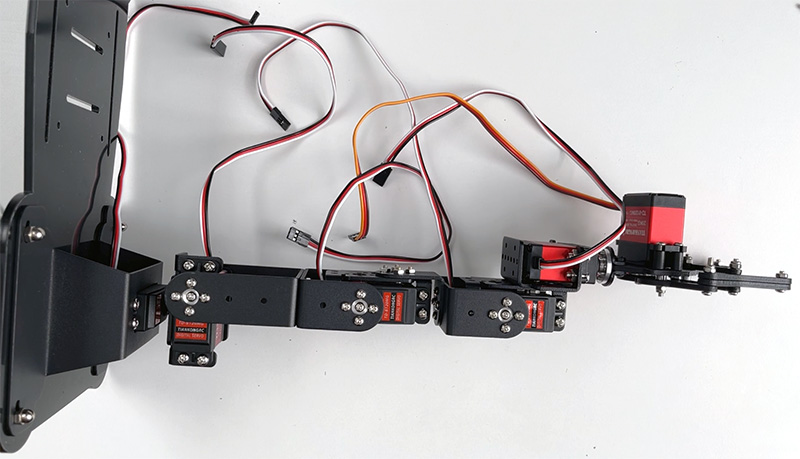
이제 이전에 조립된 베이스판위의 서보모터에 결합합니다. 위 방향으로 일자가 되도록 하며 앞뒤 방향이 바뀌지 않도록 합니다. 디스크에 고정은 M3x6 볼트로 합니다.
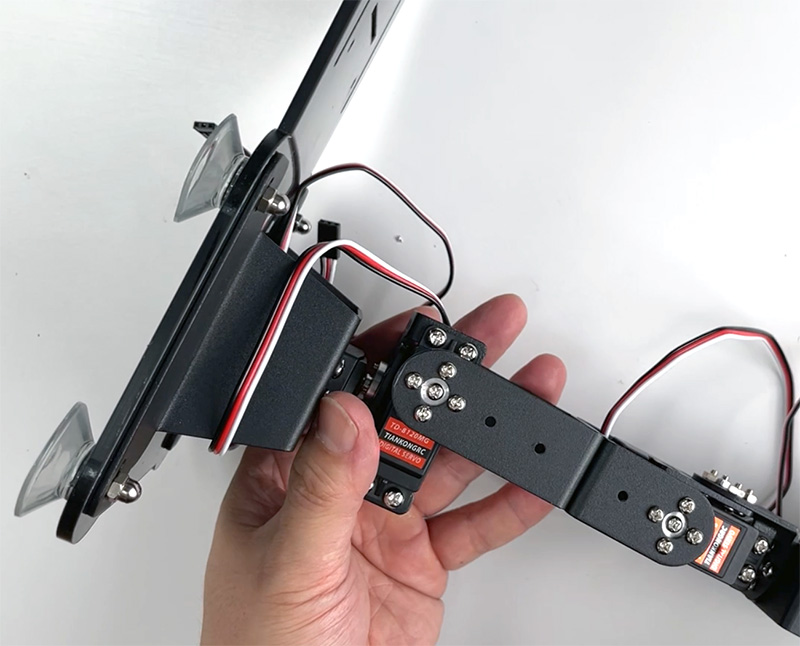
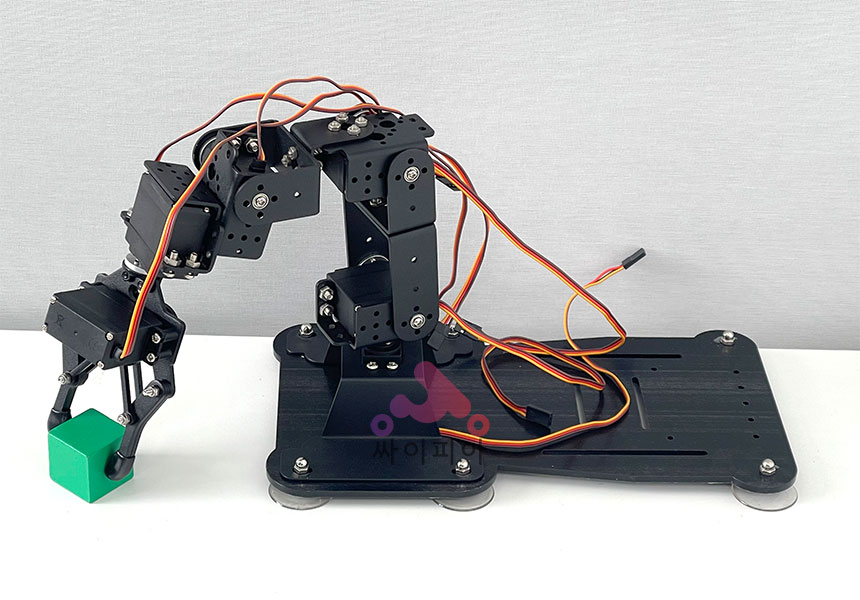
아래는 완성된 모습입니다. 각자 조립한 상태와 비교해 보시기 바랍니다.
3. 참고 영상
Author

scipia
싸이피아