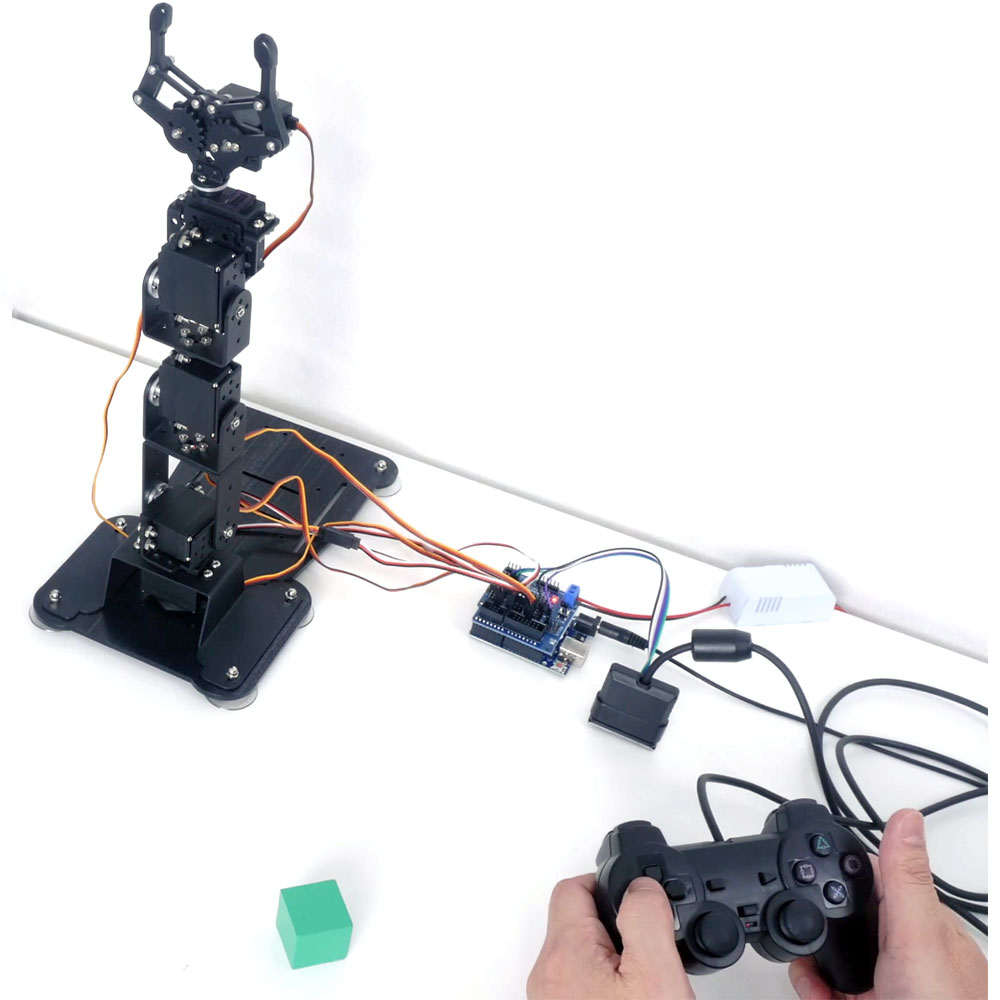
PS2 호환 게임패드(게임컨트롤러, 조이스틱)로 로봇팔 제어하기
PS2 호환 게임패드를 변환 모듈을 통해 아두이노 보드와 연결하고 이 게임패드로 6자유도 로봇팔을 조정하는 등 아두이노를 활용한 다양한 응용 분야에서 활용가능합니다.
PS2 호환 게임패드를 변환 모듈을 통해 아두이노 보드와 연결하고 이 게임패드로 6자유도 로봇팔을 조정하는 등 아두이노를 활용한 다양한 응용 분야에서 활용가능합니다.
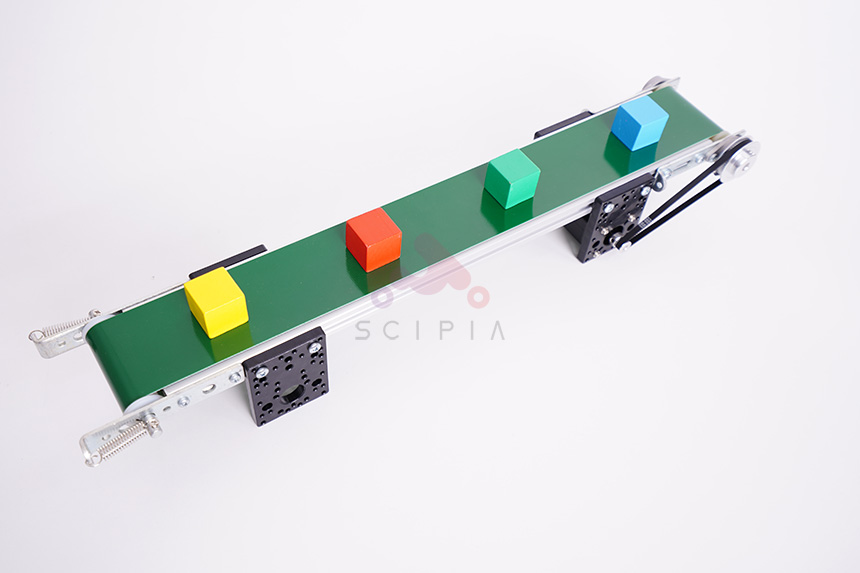
미니 데스크탑 컨베이어벨트는 탁상에 올려놓을 수 있는 소형 사이즈의 컨베이어벨트로서 아두이노, 라즈베리파이 등을 활용하여 스마트공장 실습을 할 수 있으며 공장자동화 교육, PLC교육, 기타 소형 공장자동화 시스템에서도 활용가능합니다.
이 컨베이어벨트는 스텝모터로 구동되며 타이밍 풀리 벨트로 연결되어 3:1로 감속은 물론 토크가 증가됩니다.
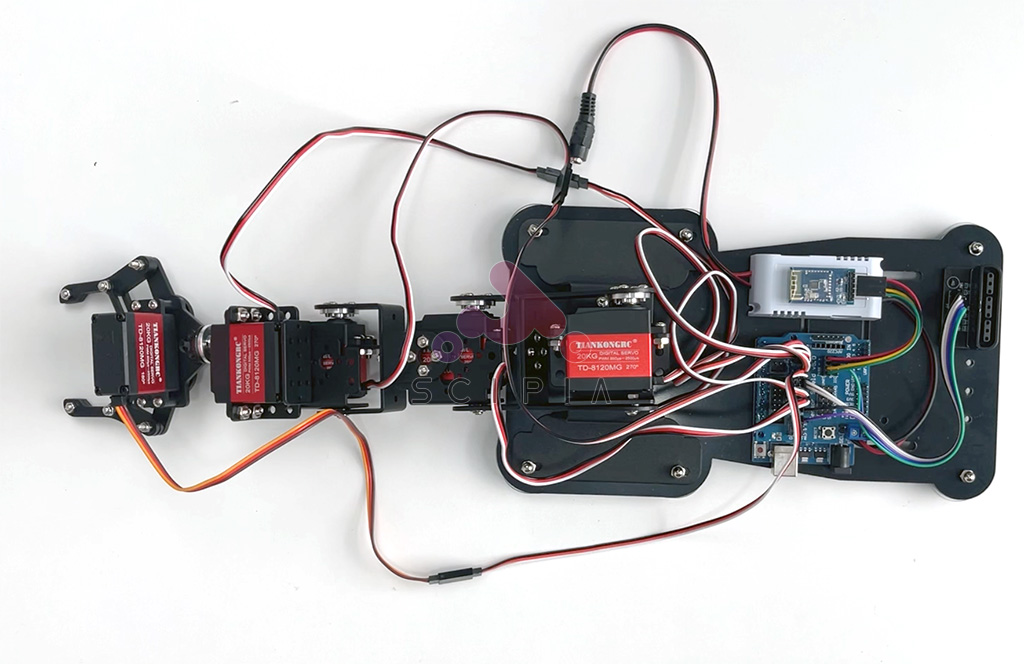
싸이피아(SCIPIA) 로보콘(ROBOCON) 로봇팔 조립 튜토리얼 2편입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 기본적으로 20kg급의 디지털 서보모터 6개로 동작됩니다.
2편에서는 전체적인 결선 및 아두이노 보드와 연결, 기타 제어방법에 대하여 설명합니다.
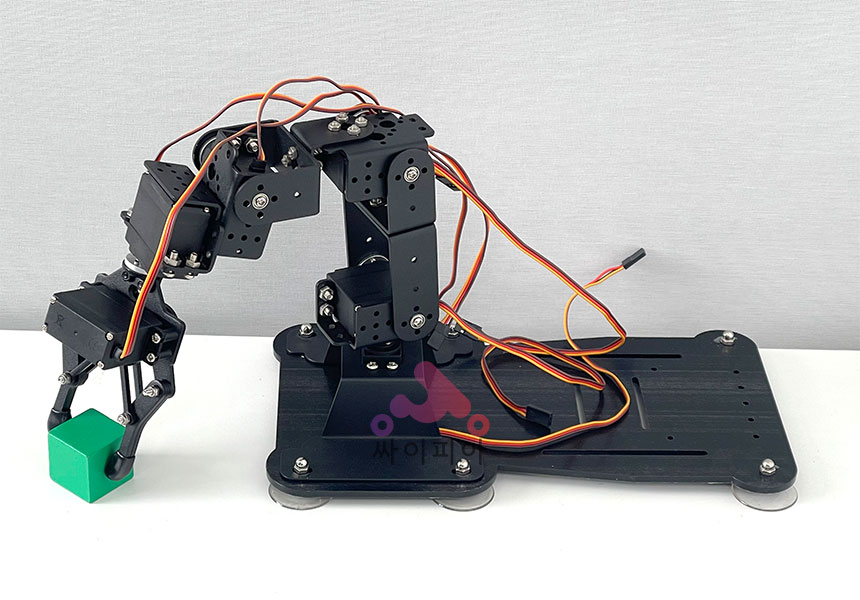
싸이피아(SCIPIA) 로보콘(ROBOCON) R1 로봇팔 조립 튜토리얼 입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 심플한 구조와 대형 흡착판 사용으로 조작 편의성을 증대하였습니다.
서보모터 구성품만 다른 두 가지의 제품 구성이 있습니다. 조립방법은 동일합니다.
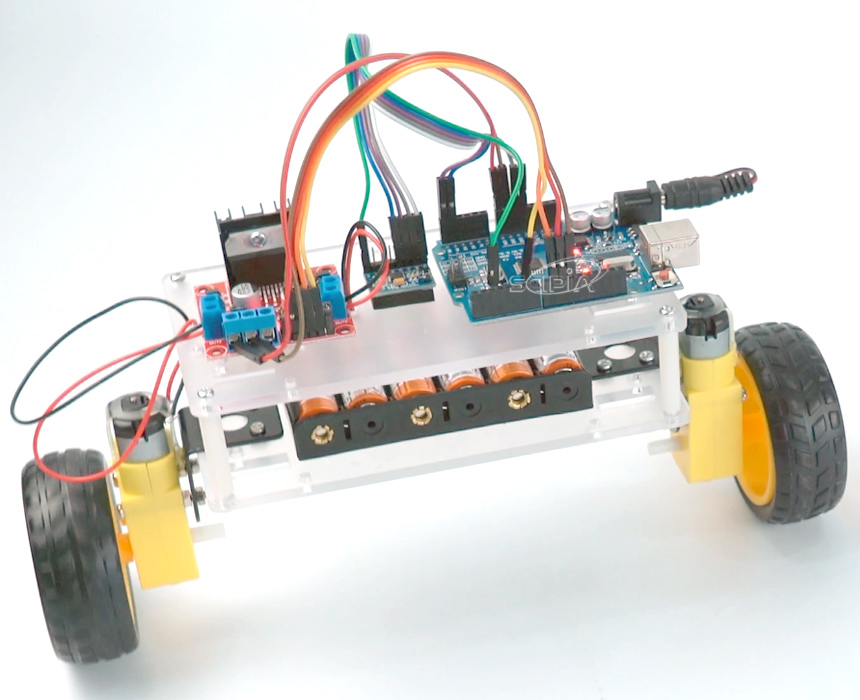
여기서는 세그웨이(Segway)와 같이 두 바퀴로 균형을 유지하여 넘어지지 않는 로봇을 제작합니다.
이 로봇은 Self-balancing robot 또는 평행자동차, 밸런싱로봇, 세그웨이 로봇으로 불리우며 여기서 실험하는 로봇은 매우 단순한 구조로 최소한의 부품으로 밸런싱로봇을 구현해보고 원리를 이해하는데 목적을 두고 있습니다.
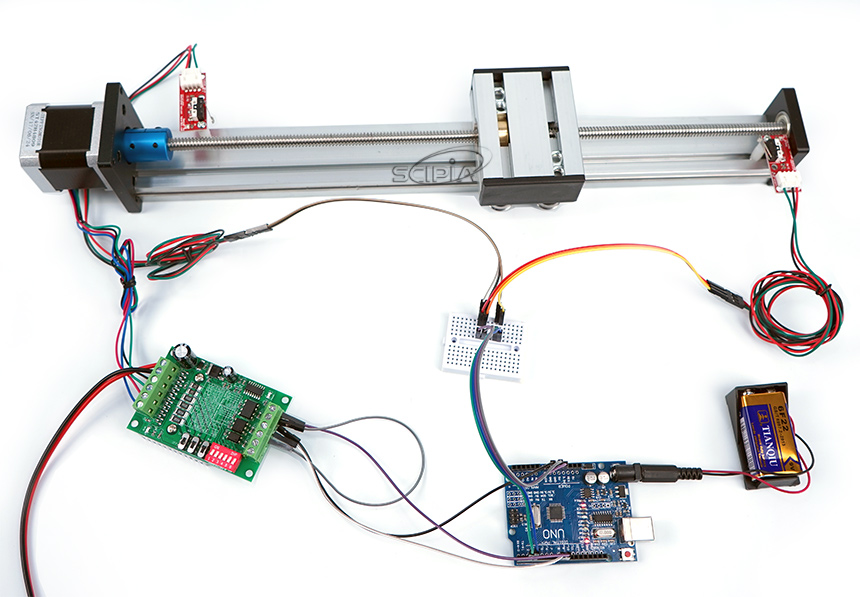
아두이노를 사용하여 리니어 이송레일을 구동하는 실험을 합니다. 400mm 리니어 이송 레일 슬라이더이며, T8(8mm) 2mm피치(한바퀴에 2mm이동)의 리드스크류와 NEMA17 4248 스텝모터가 사용되었습니다.
이송속도는 초당 0~20mm이며 오차는 약 0.5mm입니다. 횡축 부하는 최대 15Kg입니다.
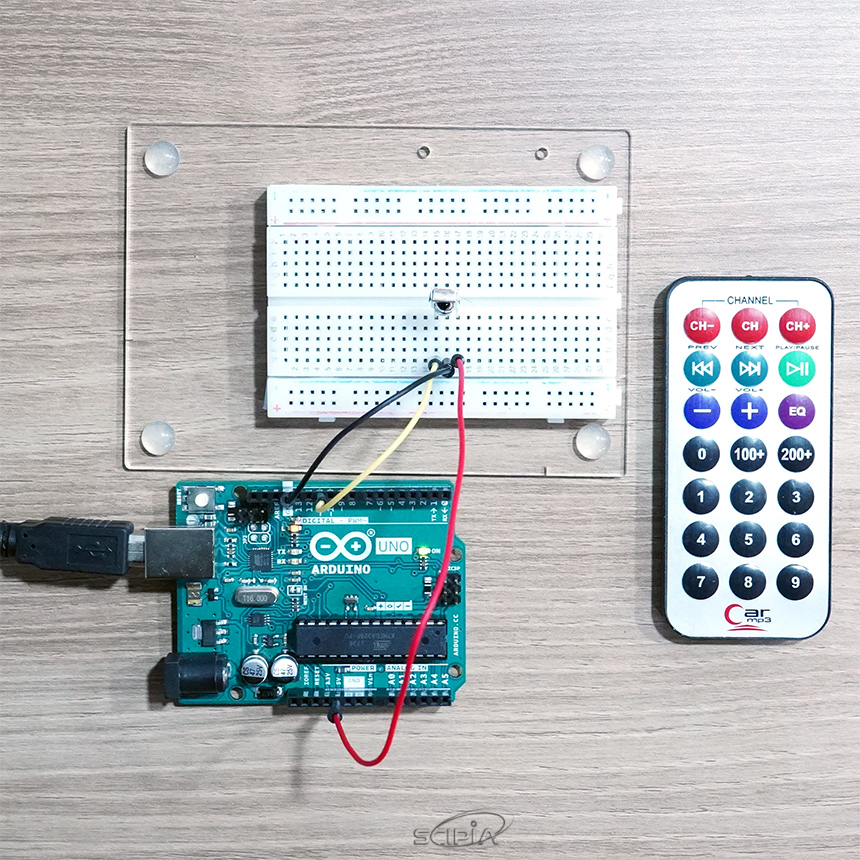
이 번에는 아두이노에서 적외선 리모컨을 사용하는 방법을 소개합니다. IR 또는 적외선은 가전기기를 포함한 단순 무선 통신에 광범위하게 사용되며 구현함에 있어서 매우 쉽고 가격이 저렴한 것이 특징입니다. 적외선은 가시 광선과 매우 유사하지만 파장이 길며 사람의 눈에는 보이지 않습니다.
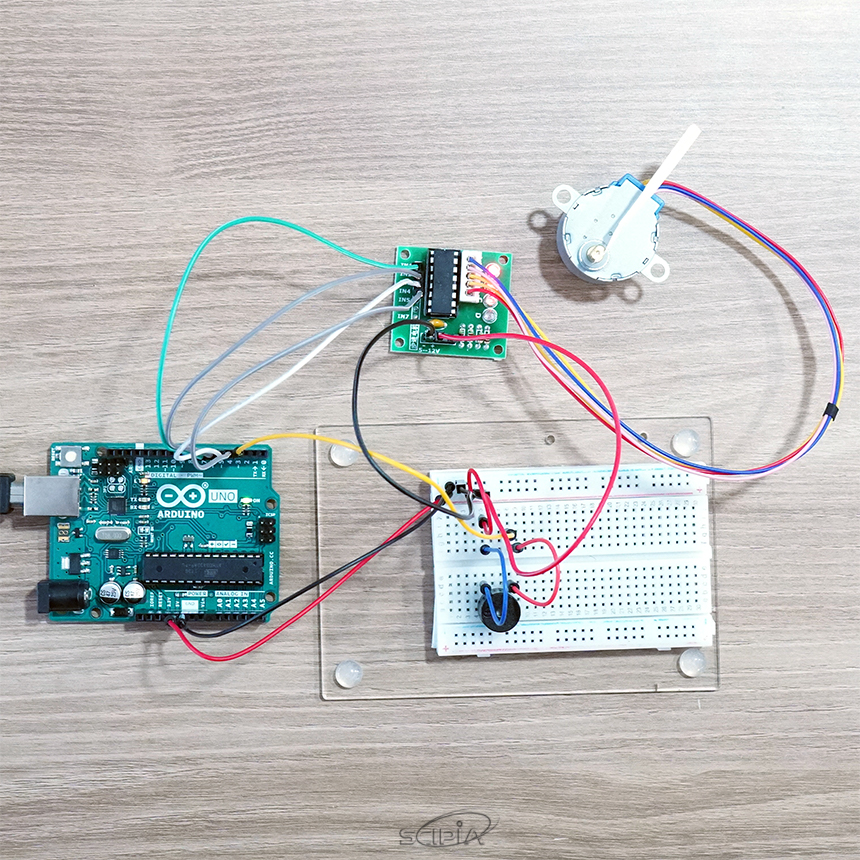
스텝모터는 펄스를 사용하여 정해진 각도만큼 회전하는 모터입니다. 실제로는 스텝모터 구동을 위해 스텝모터 드라이버가 사용되며 스텝모터 드라이버가 펄스 신호를 받으면 스텝모터를 구동하여 정해진 각도(스텝각)로 설정된 방향으로 회전시킵니다. 위치 및 회전 각도 제어를 위해서는 펄스의 수를 사용하며 회전 속도는 펄스의 주파수로 제어하게 됩니다.
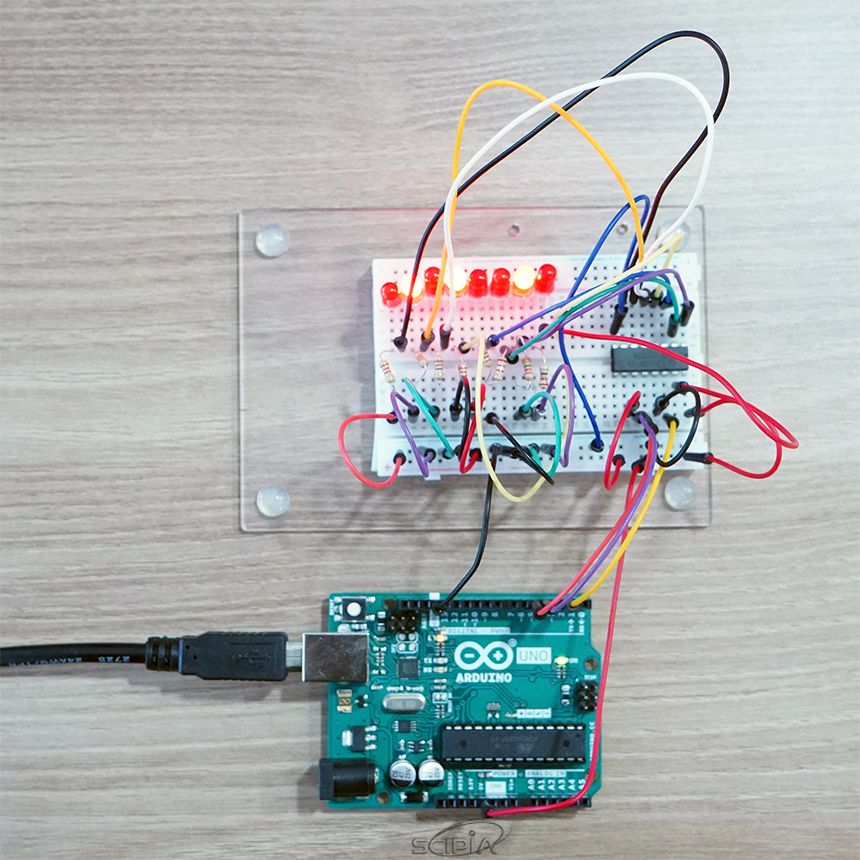
이 번에는 74HC595 실험을 합니다. 74HC595는 직렬 데이터 입력을 8비트의 병렬로 출력할 수 있는 로직 IC(8-Bit Serial to Parallel Shift Register)입니다. 74HC595를 쓰는 가장 큰 이유는 한정된 디지털 IO로 많은 디지털 출력을 제어하기 위함입니다.
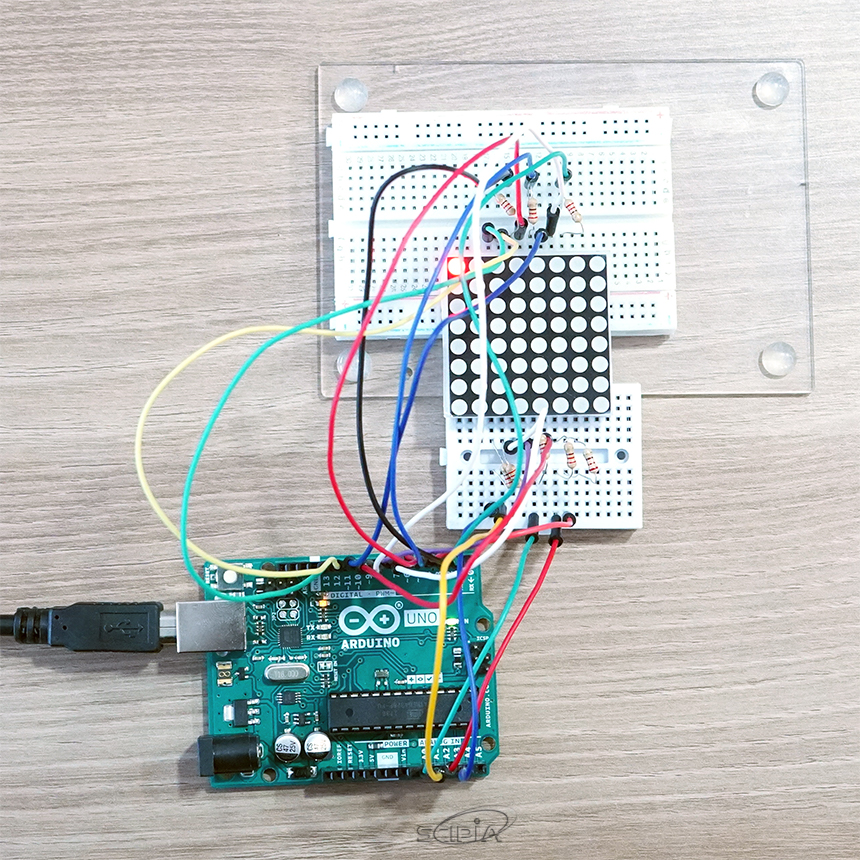
이번에는 8x8 LED 도트 매트릭스를 구동하는 실험입니다.