싸이피아 로보콘(SCIPIA ROBOCON) 아두이노 로봇팔 키트 조립 튜토리얼#2-6자유도 메탈 블루투스 무선 스마트폰 제어
싸이피아(SCIPIA) 로보콘(ROBOCON) 로봇팔 조립 튜토리얼 2편입니다. 동영상을 메인으로 따라하시는 것을 권장합니다.
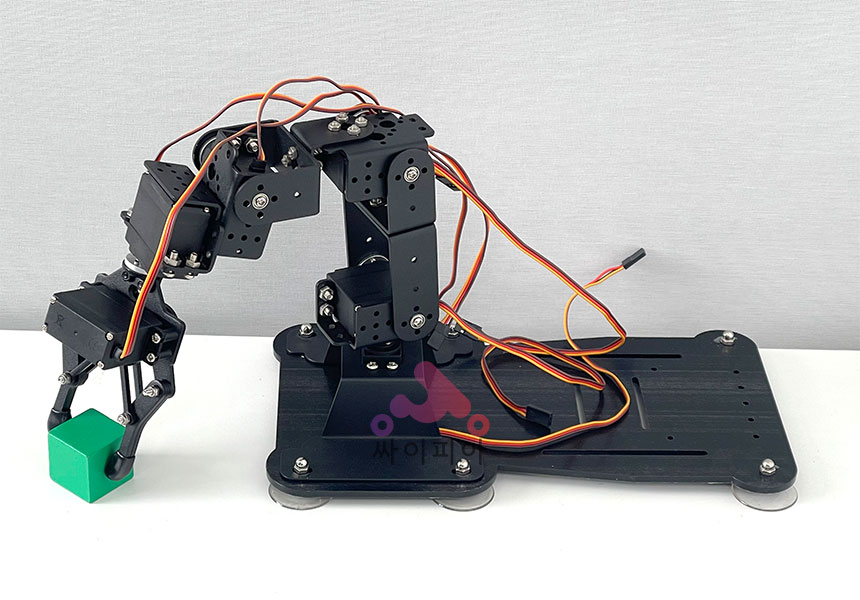
로보콘 로봇팔은 6자유도의 알루미늄 바디의 구조로 되어 있으며 기본적으로 20kg급의 디지털 서보모터 6개로 동작됩니다.
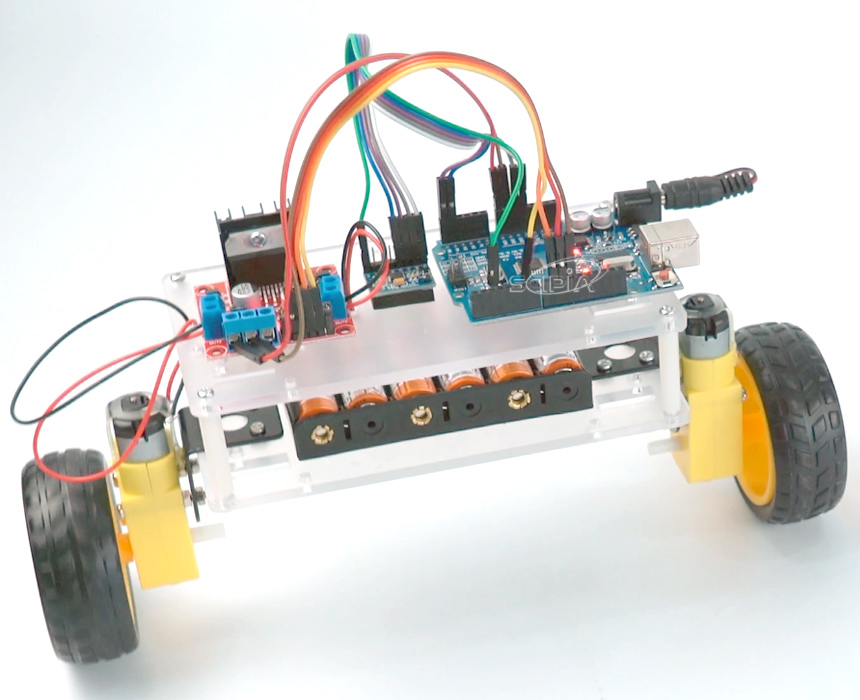
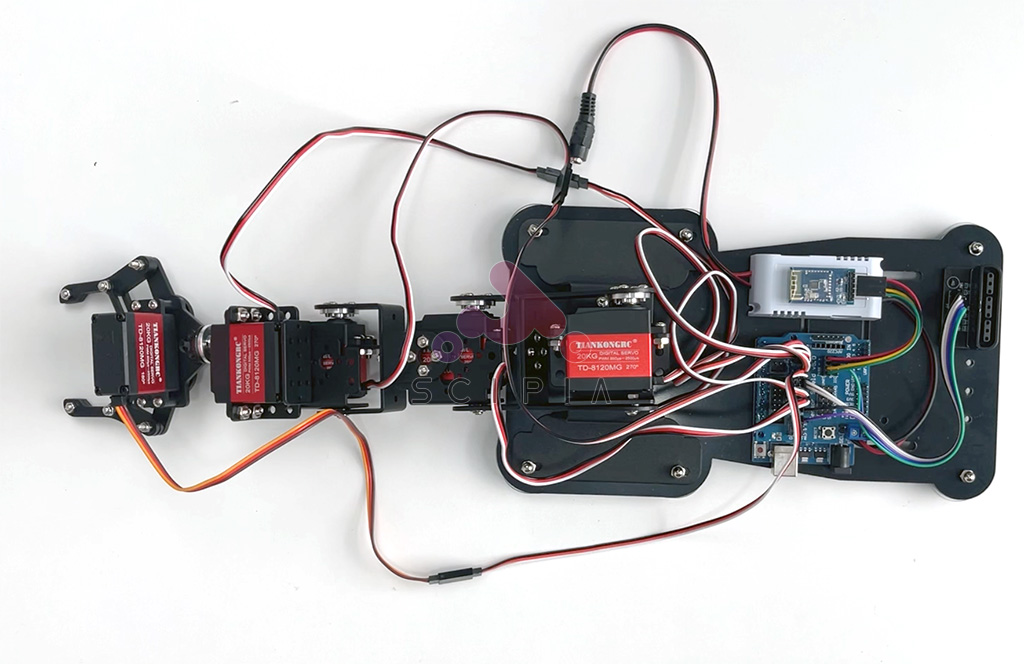
2편에서는 전체적인 결선 및 아두이노 보드와 연결, 기타 제어방법에 대하여 설명합니다.