SAMON1 아두이노 미세먼지측정기 키트 조립방법
아두이노 우노 보드를 활용한 미세먼지측정기 키트로서 미세먼지 센서를 이용하여 PM2.5 농도를 측정하여 표시하며 DHT11온습도 센서를 통해 현재의 온도와 습도를 표시합니다.
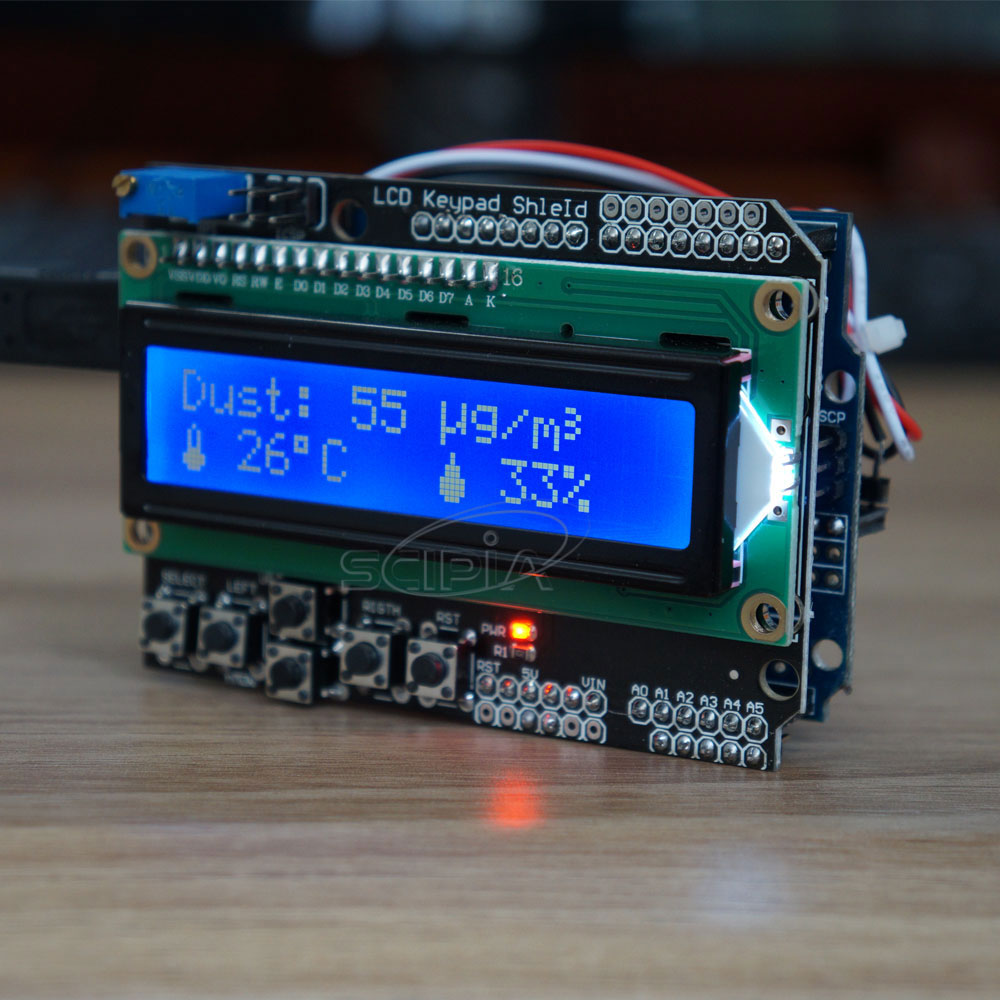

아두이노 우노 보드를 활용한 미세먼지측정기 키트로서 미세먼지 센서를 이용하여 PM2.5 농도를 측정하여 표시하며 DHT11온습도 센서를 통해 현재의 온도와 습도를 표시합니다.
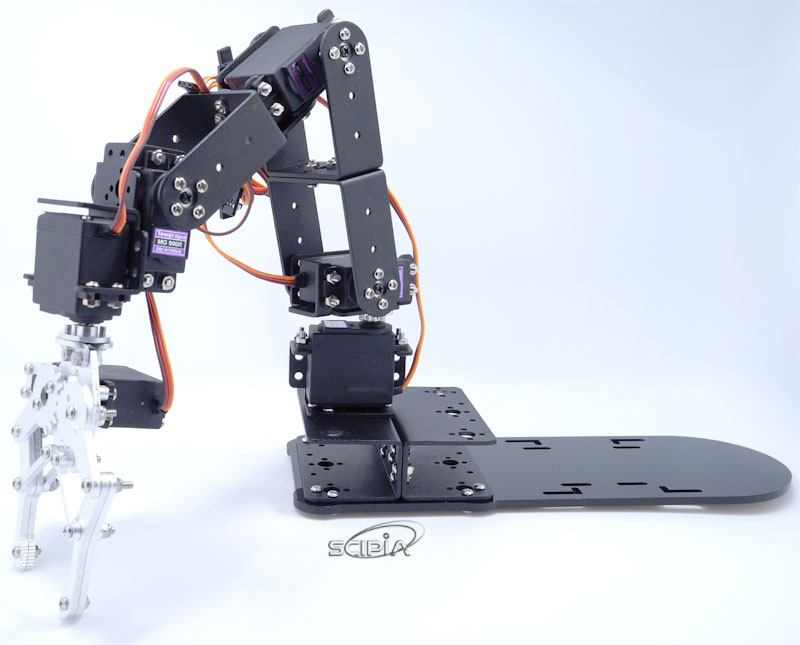
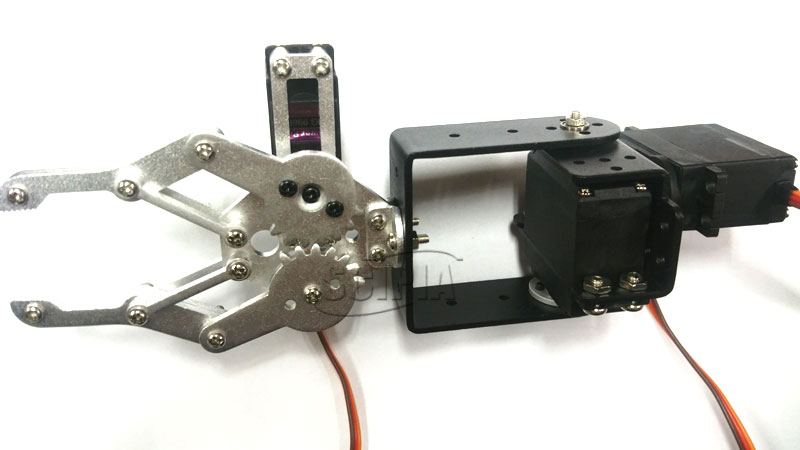
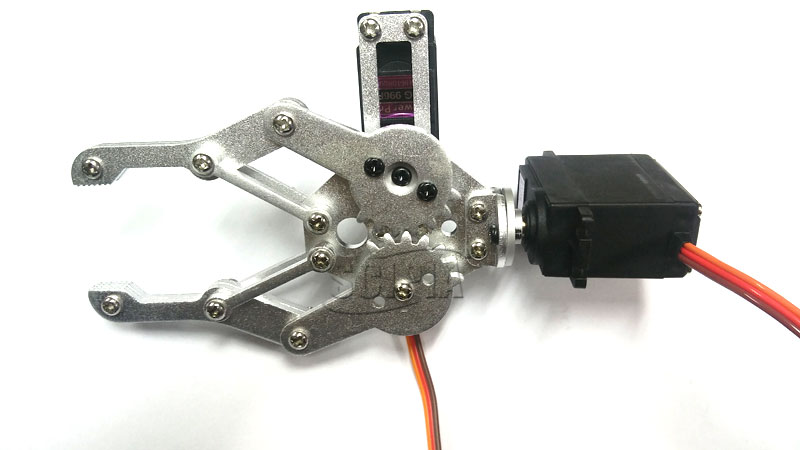
알루미늄 브라켓과 6개의 메탈서보모터를 사용한 6자유도 로봇의 기구부 조립방법에 대하여 설명합니다. 구동부에 설명은 2편을 참조하시기 바랍니다.
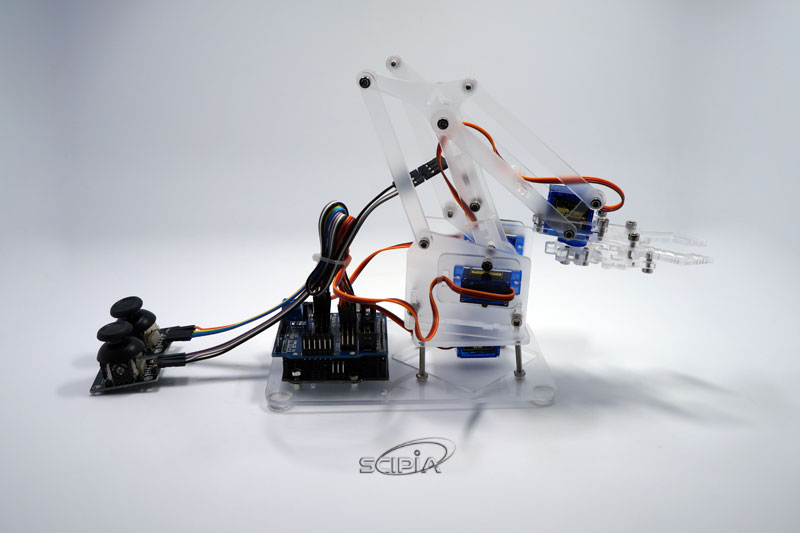


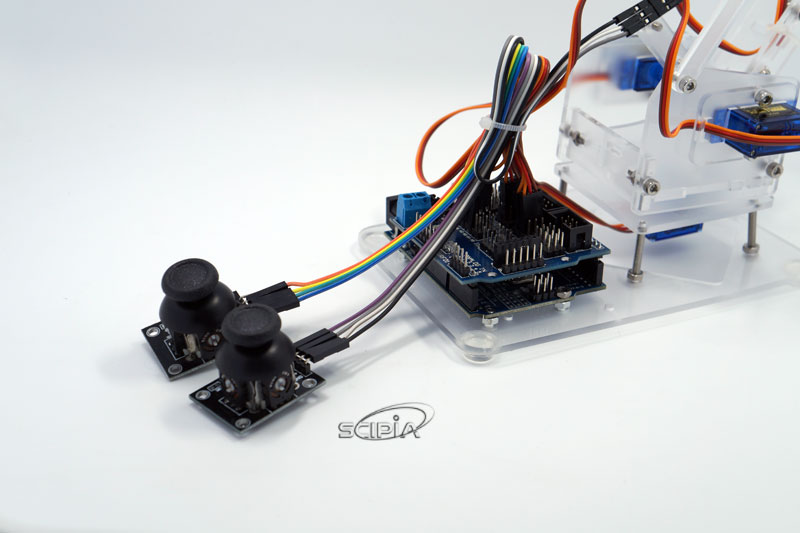
조립 완료된 4자유도 아크릴 로봇팔을 아두이노 우노보드로 프로그램하고 제어하는 방법에 대해 알아봅니다. 로봇팔은 총 4개의 서보모터로 구동되며 각각 좌우회전, shoulder(어깨)축 이동, elbow(팔꿈치)축 이동, 그립퍼 열고 닫기를 담당합니다. 아두이노 우노보드에 센서쉴드보드를 결합하여 결선을 최소화하고 조이스틱모듈 2개를 사용하여 로봇팔을 조정하게 됩니다.
플라스틱 저가형 팬틸트 조립 방법입니다. 추가로 SG90 9G 서보모터 2개가 필요합니다. 내구성을 생각하신다면 MG90 메탈타입의 서보모터를 사용하십시요.
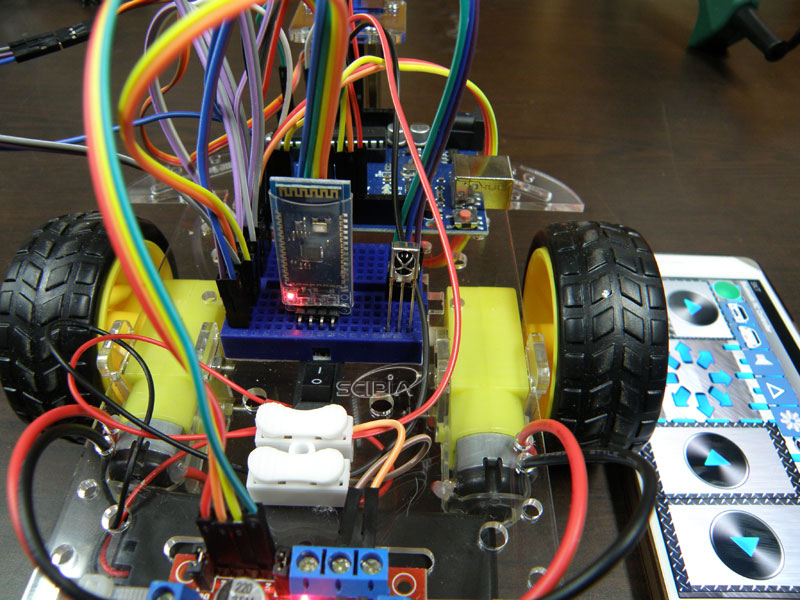
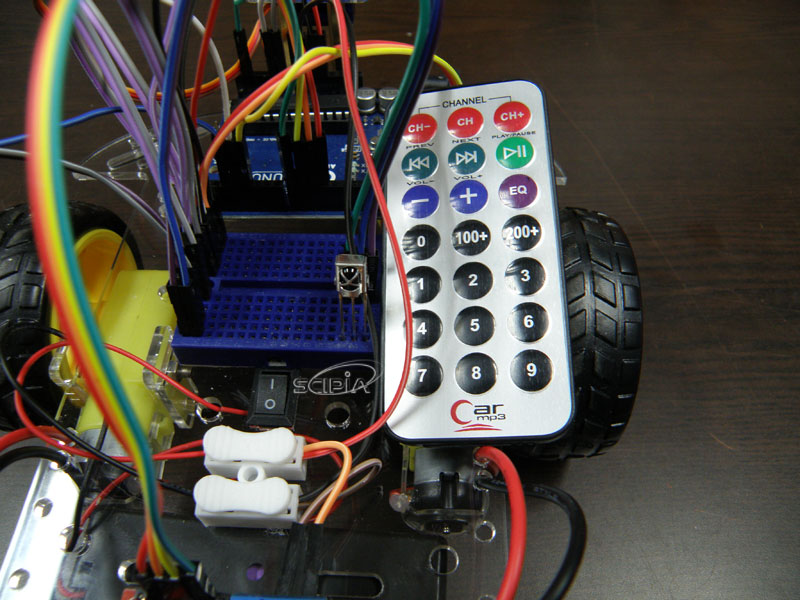
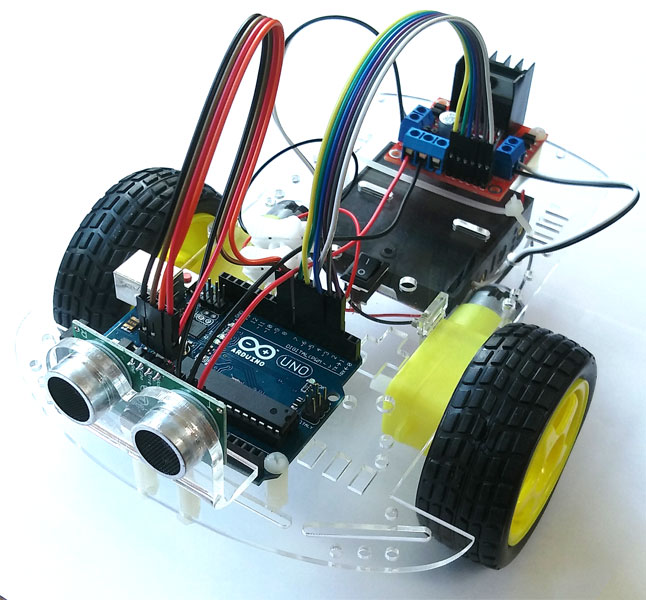
아두이노 우노를 이용한 2WD 자동차 스마트카 로봇 SPAC2입니다. SPAC1의 상위모델로 충전용 18650배터리 2개(7.4V)를 사용하여 강력한 구동이 가능하고 오랜 주행이 가능합니다.

아두이노 우노를 이용한 2WD 자동차 스마트카 로봇 SPAC2입니다. SPAC1의 상위모델로 충전용 18650배터리 2개(7.4V)를 사용하여 강력한 구동이 가능하고 오랜 주행이 가능합니다. 여기서는 초음파센서 서보패닝을 이용한 장애물회피 주행실험을 합니다.

아두이노 우노를 이용한 2WD 자동차 스마트카 로봇 SPAC2입니다. SPAC1의 상위모델로 충전용 18650배터리 2개(7.4V)를 사용하여 강력한 구동이 가능하고 오랜 주행이 가능합니다. 여기서는 TCRT5000모듈 2개를 사용하여 라인트레이서 주행실험을 합니다.

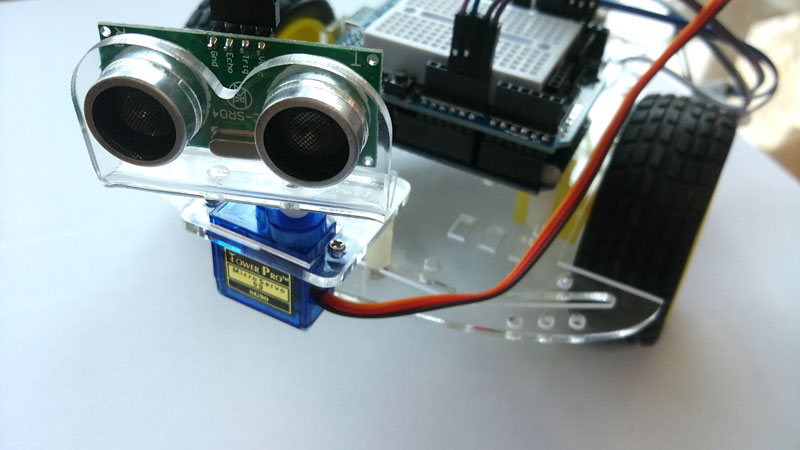
PART2에서는 아두이노 보드에 프로그램을 업로드하고 초음파테스트, 모터구동테스트를 거친 후 최종 구동소스로 주행테스트를 진행합니다.
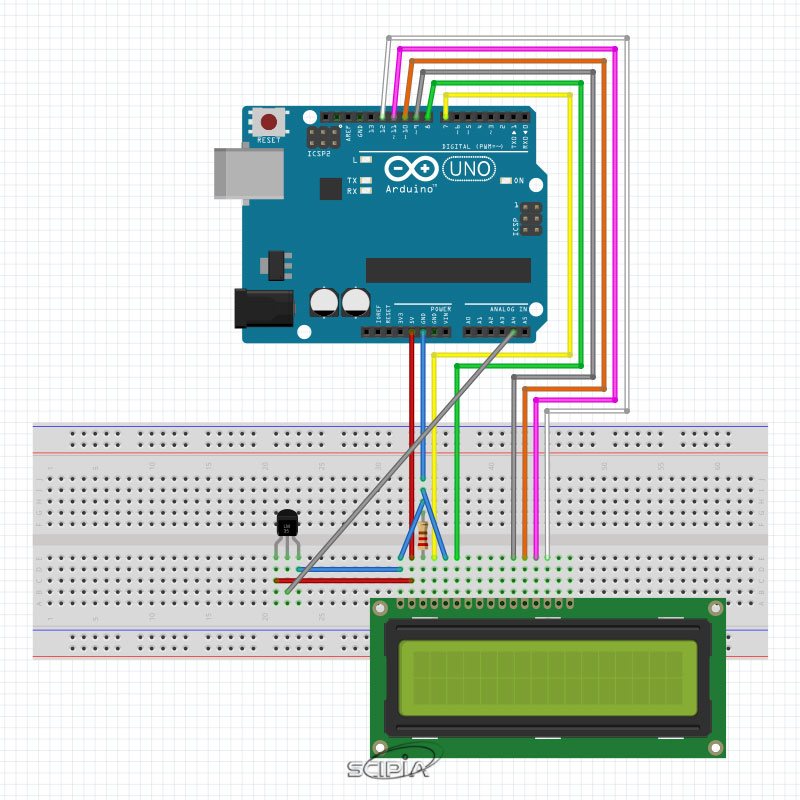
LM35온도센서는 외부온도에 따라 비례하는 전압값을 출력하는 센서로 아두이노 보드로 손쉽게 온도값을 얻을 수 있습니다. 0°C에서는 0V이며 1°C 당 10mV씩 전압이 증가합니다.