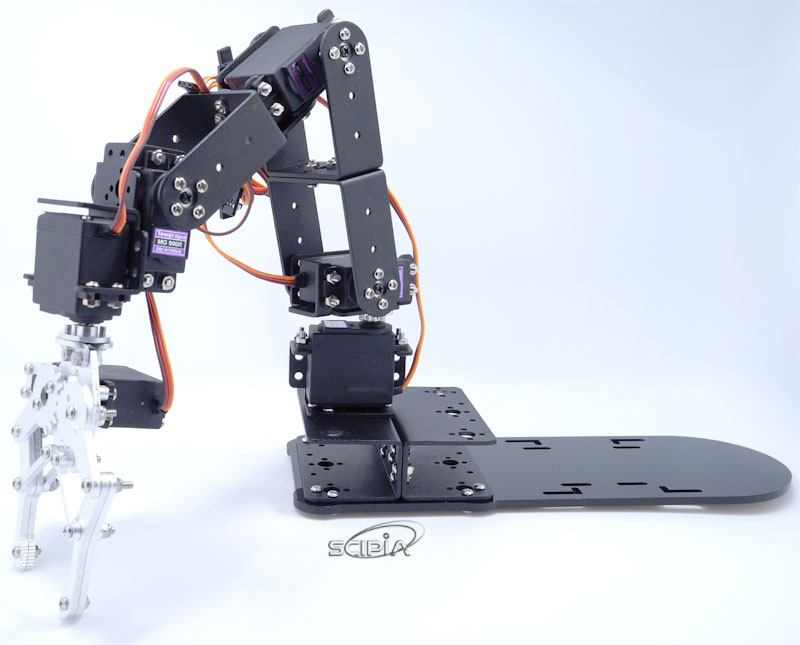
6자유도 알루미늄 로봇팔 로봇암 키트 조립방법
알루미늄 브라켓과 6개의 메탈서보모터를 사용한 6자유도 로봇의 기구부 조립방법에 대하여 설명합니다. 구동부에 설명은 2편을 참조하시기 바랍니다.
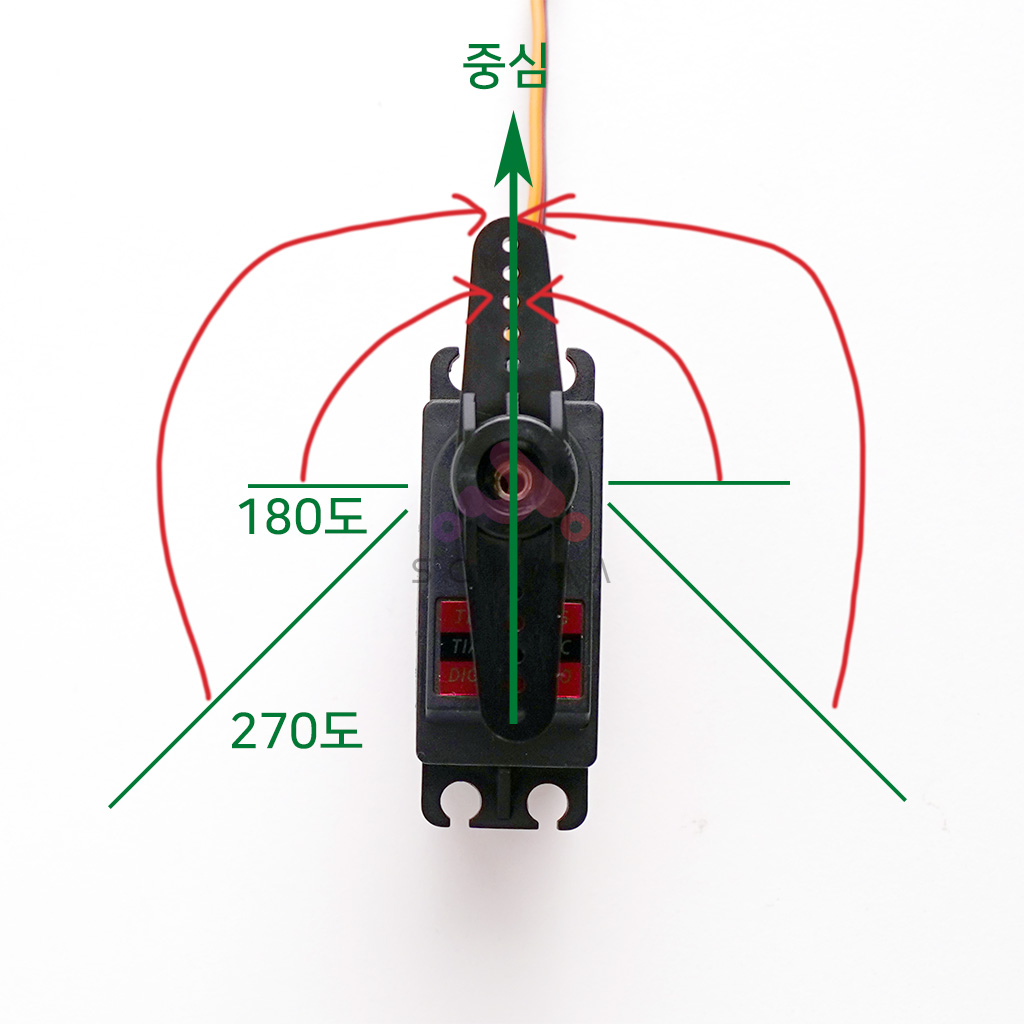
서보모터는 조립 전 회전각을 모두 중앙에 오도록 세팅해 주어야 합니다.
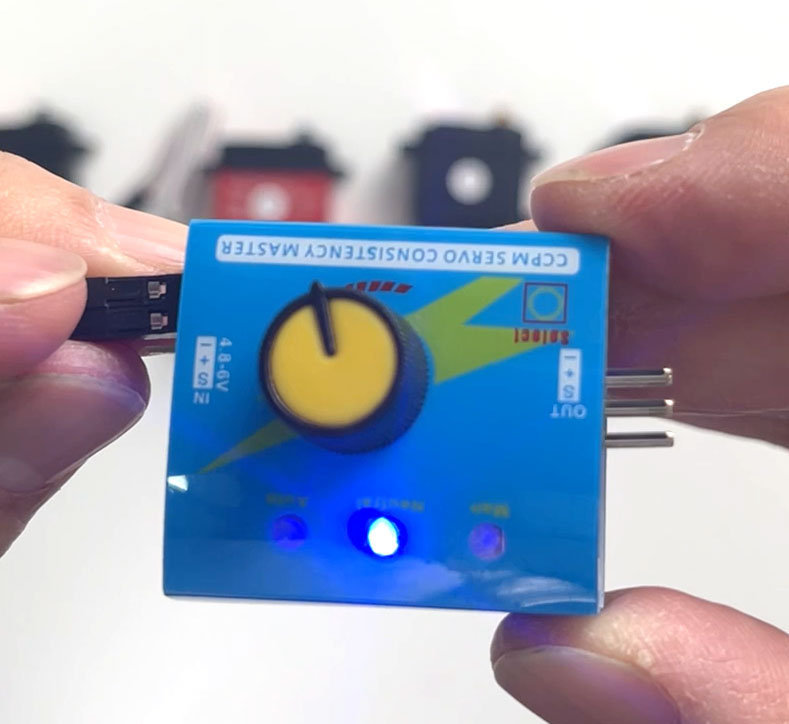
서보모터 테스터가 있는 경우 서보모터 테스터에 서보모터를 연결한 후 센터 이동 스위치(NEUTRAL)를 누르면 서보모터가 중앙으로 이동합니다.
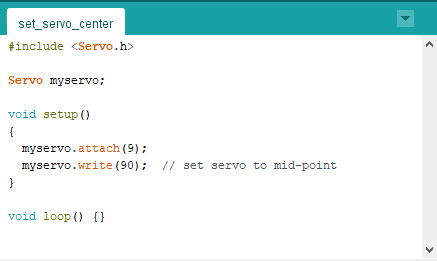
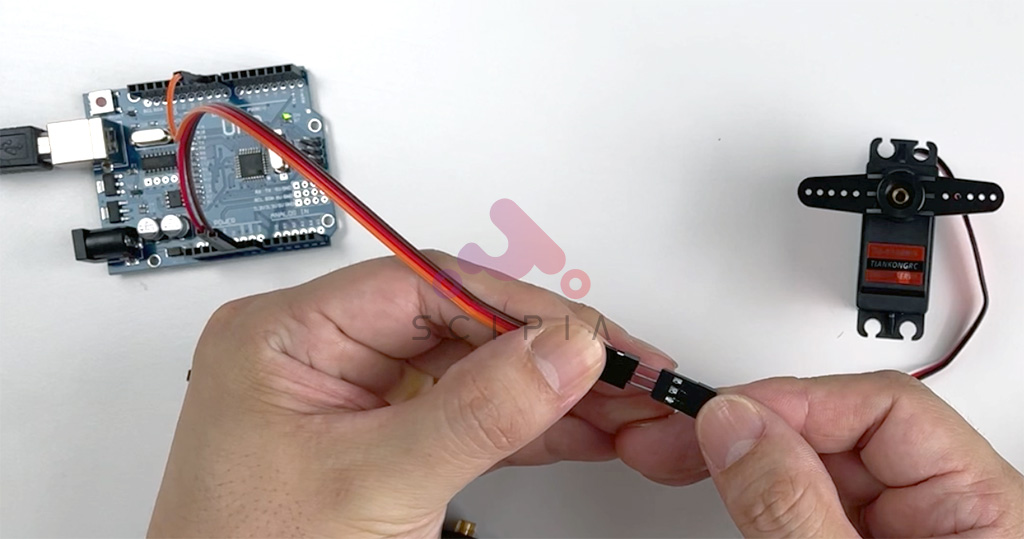
서보모터 테스터가 없는 경우에는 아두이노보드에 서보모터를 센터로 이동하도록하는 프로그램을 업로드한 후 각각의 서보모터를 연결하면 연결된 서보모터가 중앙으로 이동하게 됩니다.
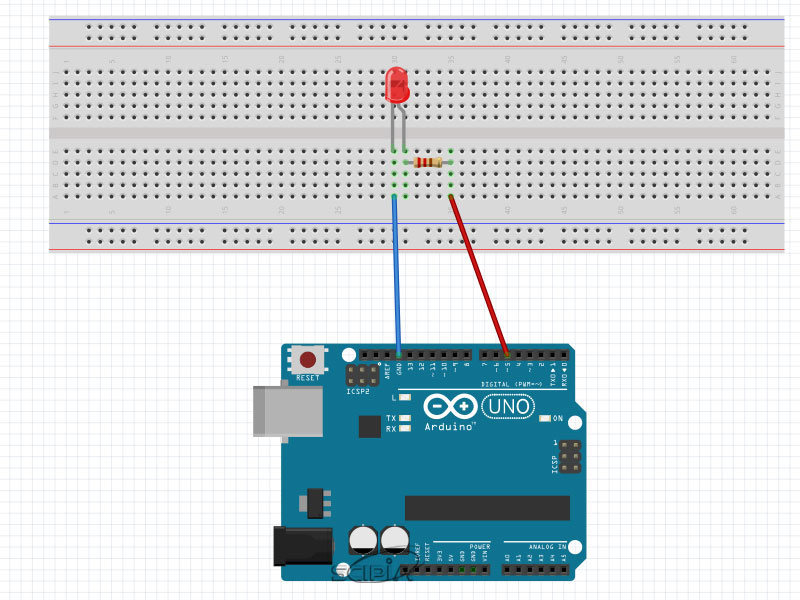
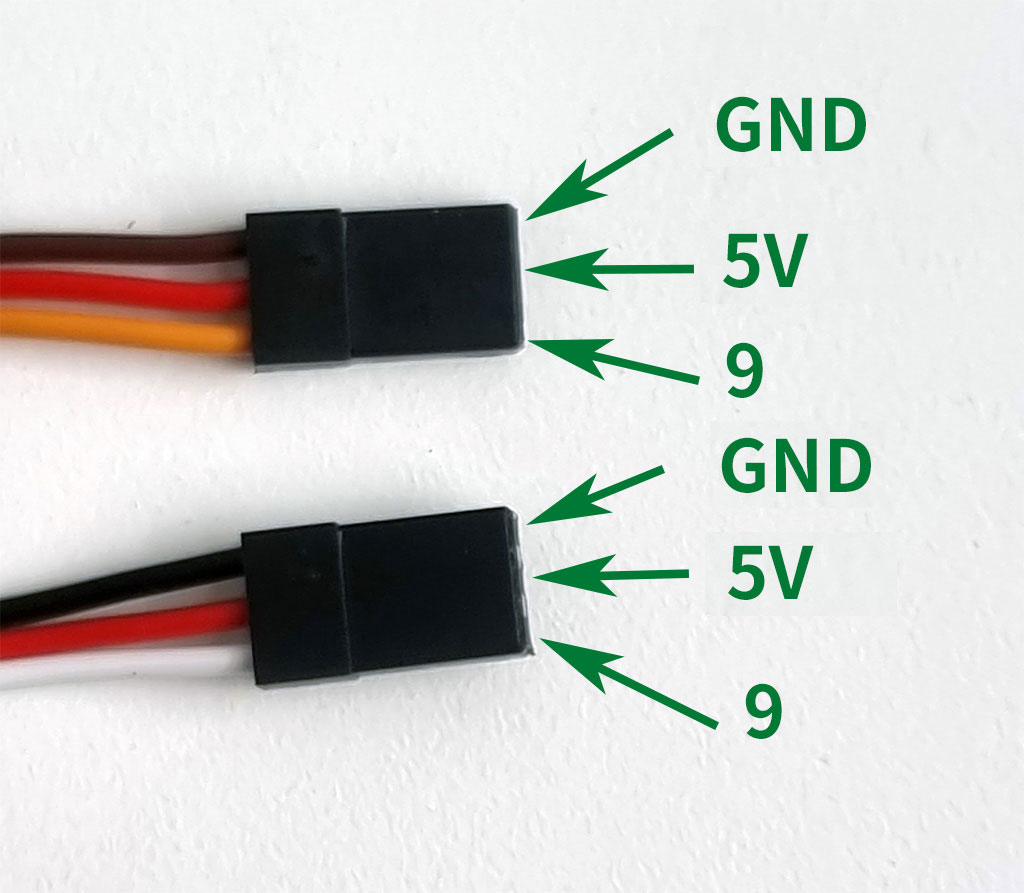
아래는 서보모터를 중앙으로 이동하게 하는 아두이노 프로그램 소스입니다. 아두이노 보드에 업로드 하고 아래 핀맵에 맞게 서보모터와 연결하면 서보모터가 센터로 이동합니다.
#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
myservo.write(90); // set servo to mid-point
}
void loop() {}
- 조립 동영상
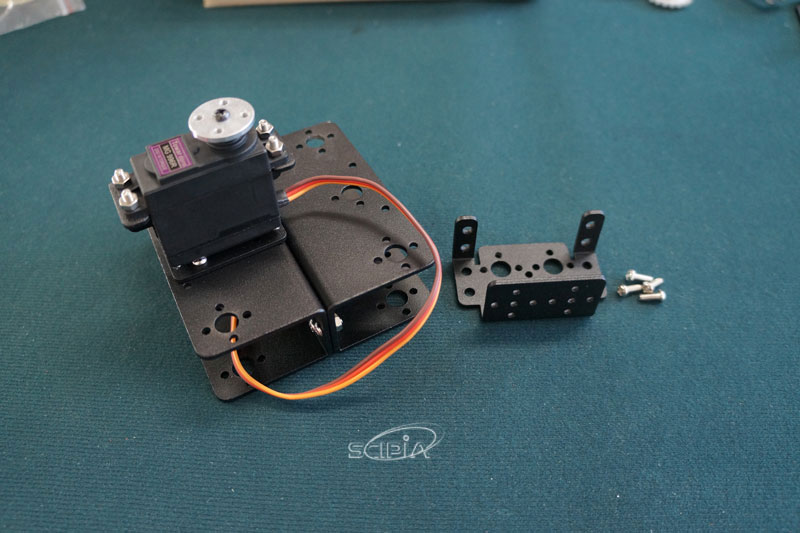
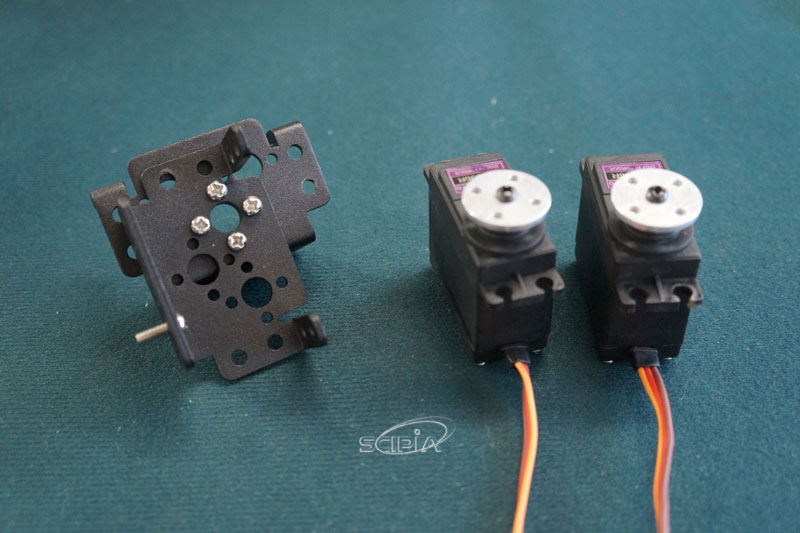
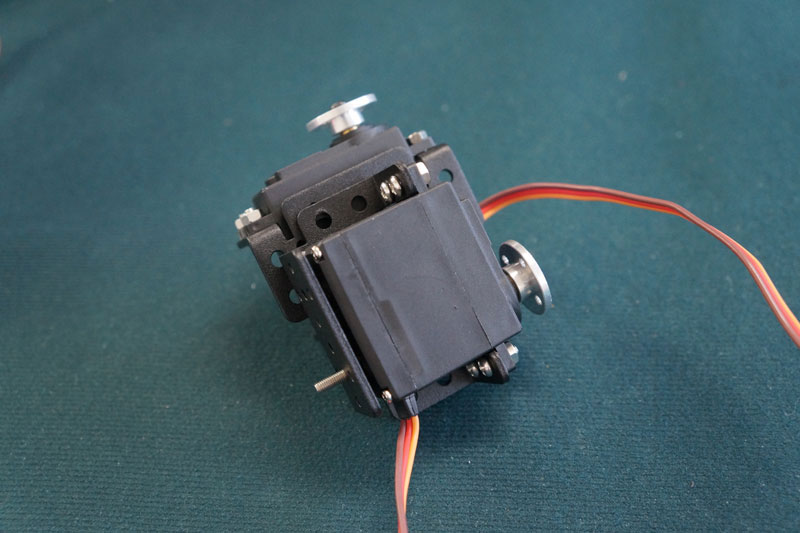
서보모터에 아래와 같이 메탈디스크를 부착하고 서보모터에 포함된 볼트로 고정합니다.

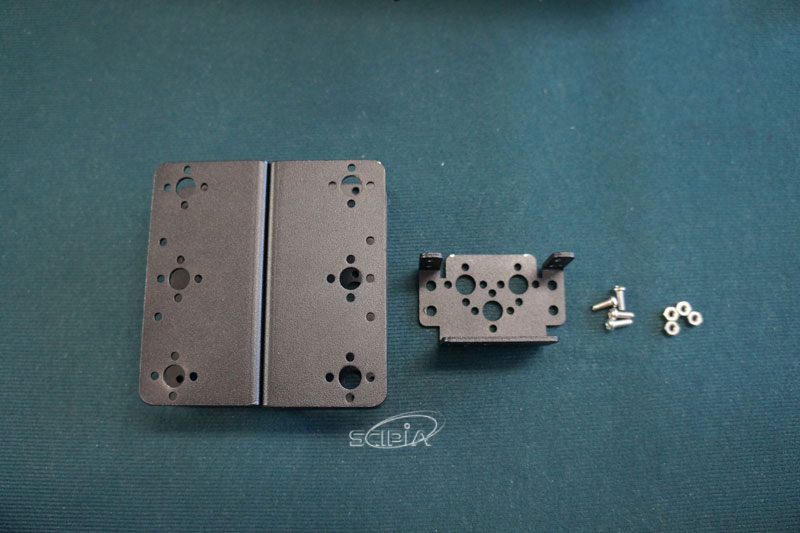
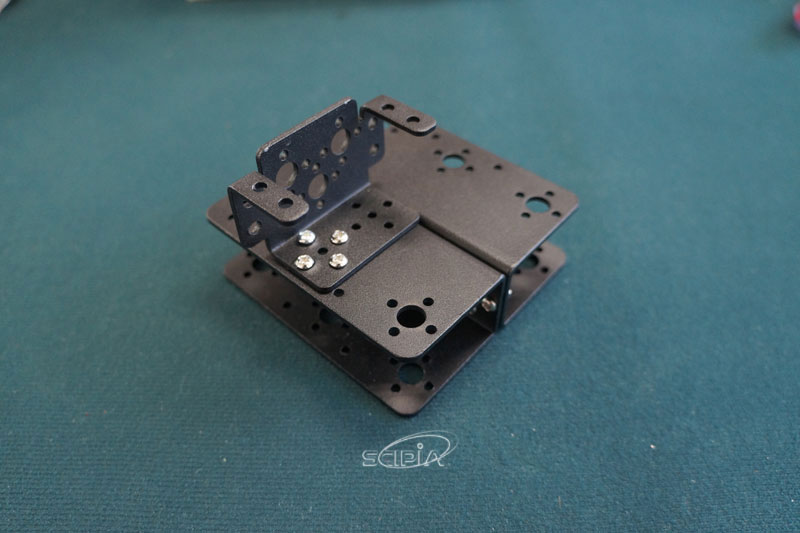
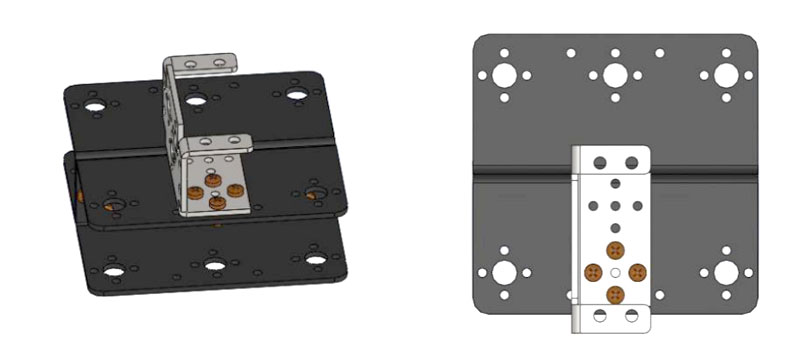
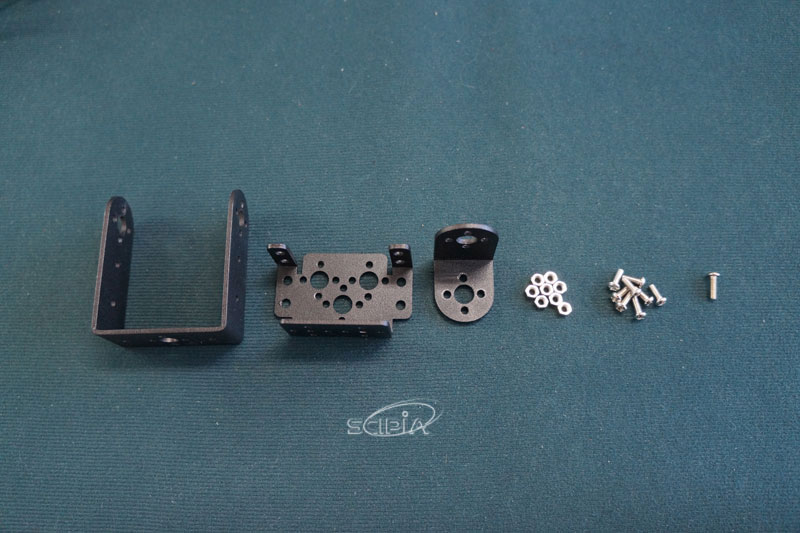
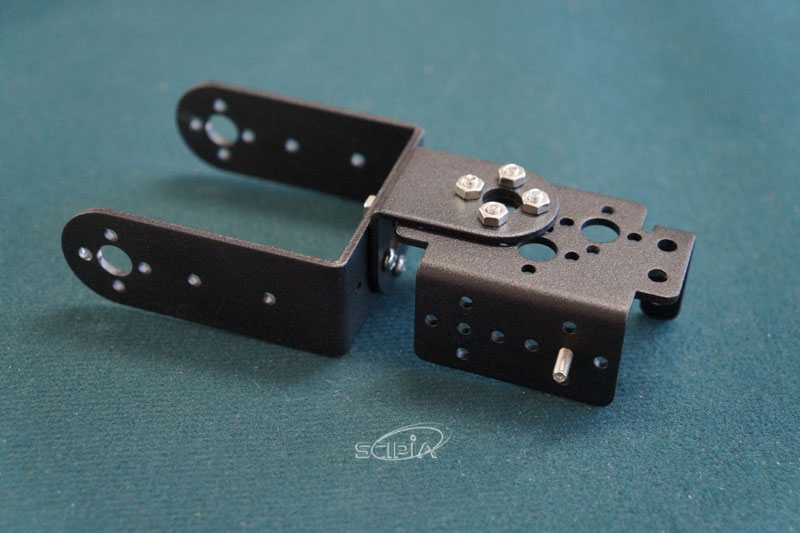
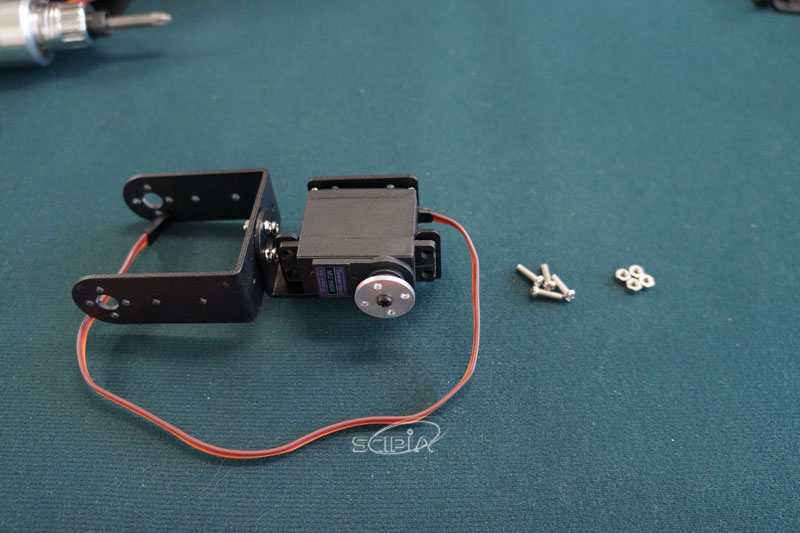
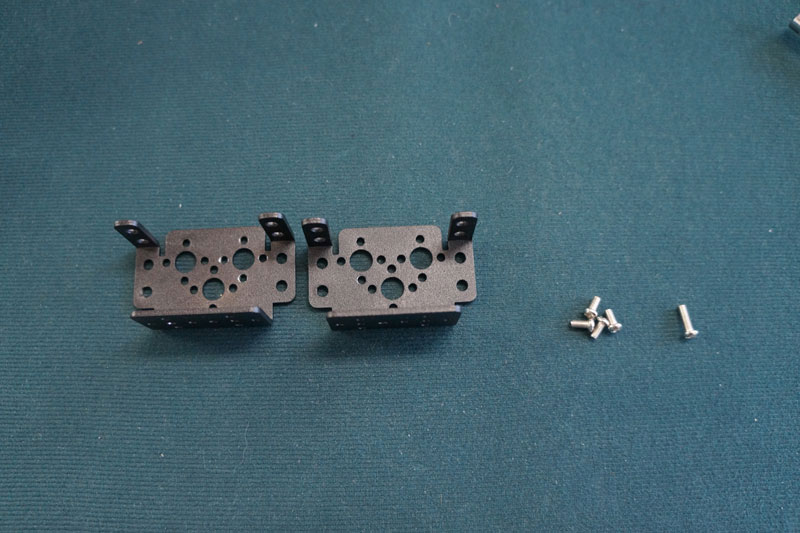
2개의 U-브라켓을 Mx8 볼트와 너트를 사용하여 고정합니다.



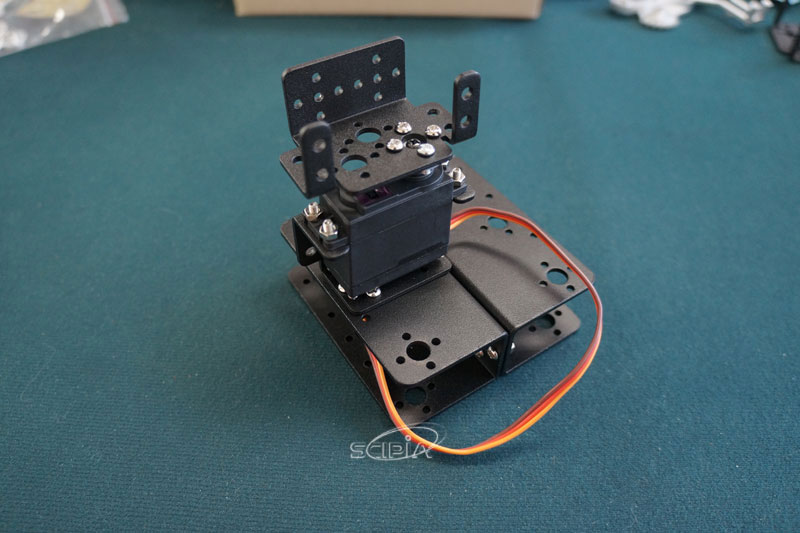
멀티펑션 브라켓을 위에서 조립한 브라켓위에 조립합니다. 이 때는 M3x8 볼트와 너트를 사용합니다.
조립시 멀티펑션 브라켓의 방향에 주의하시기 바랍니다.
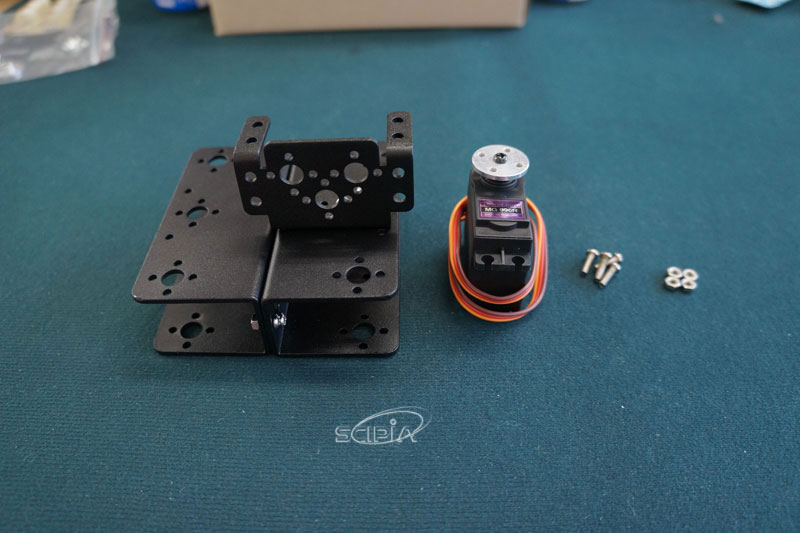
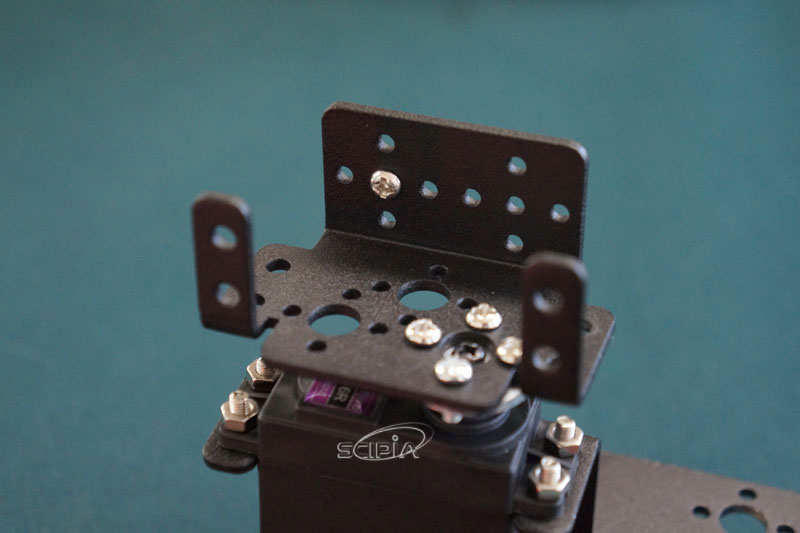
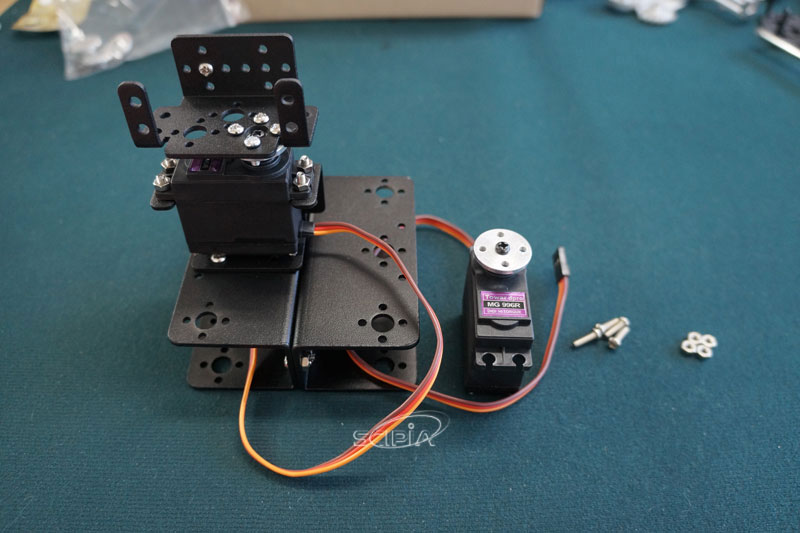
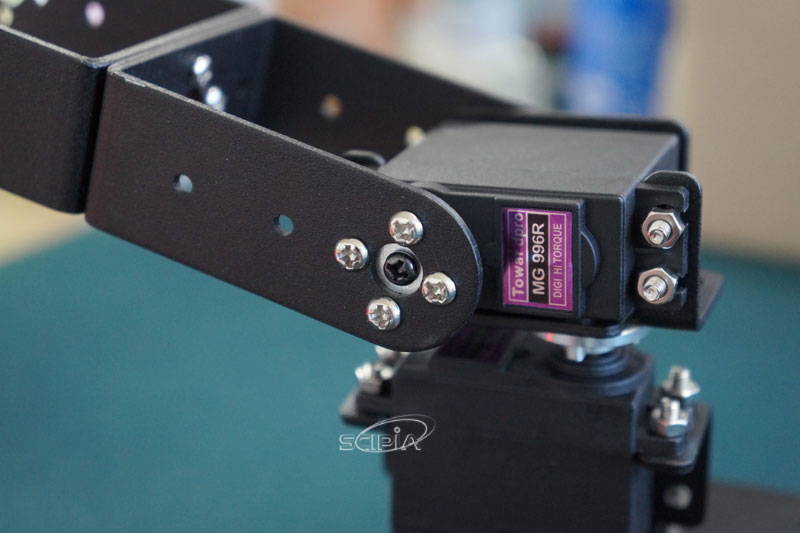
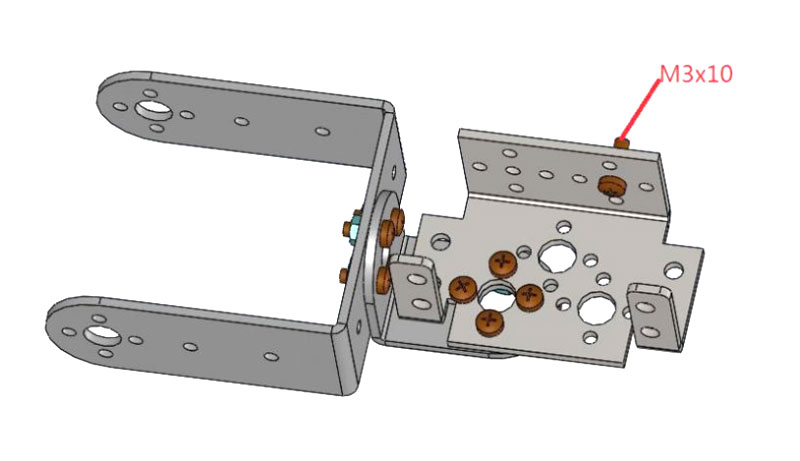
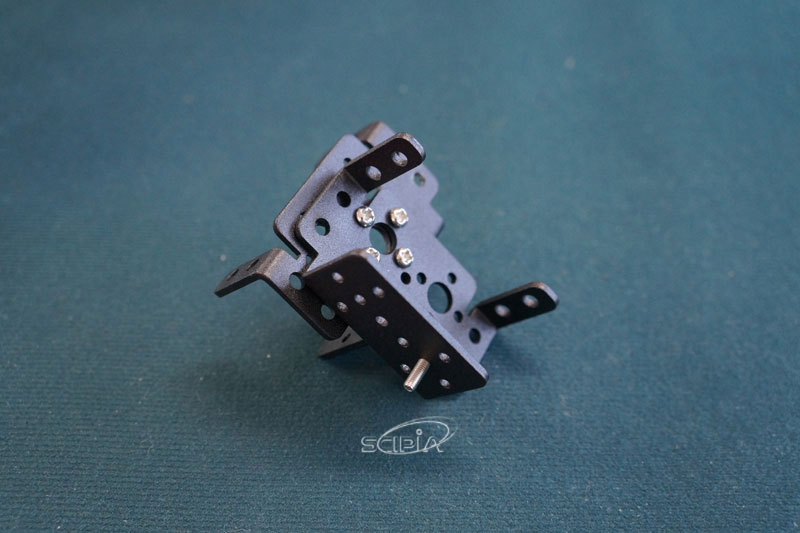
다음으로 M3x10 볼트와 너트를 사용하여 서보모터를 부착합니다.
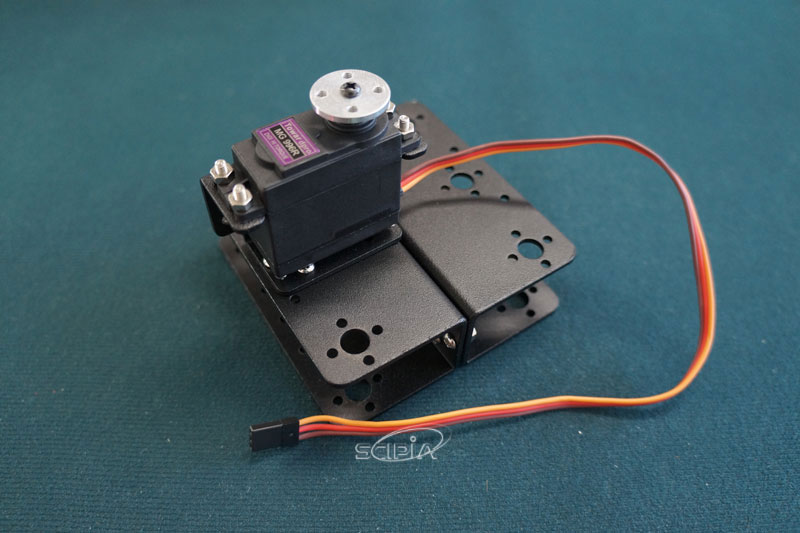
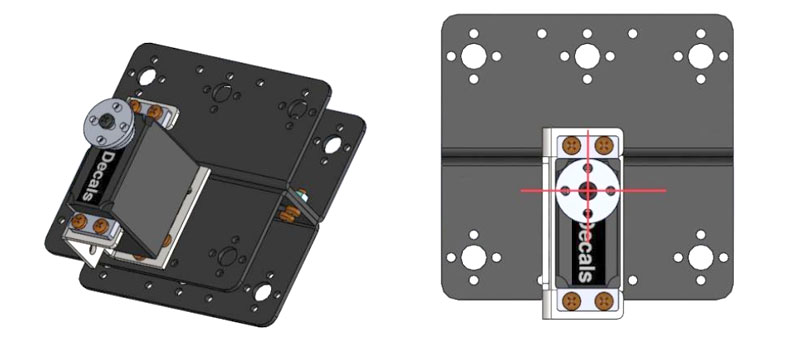
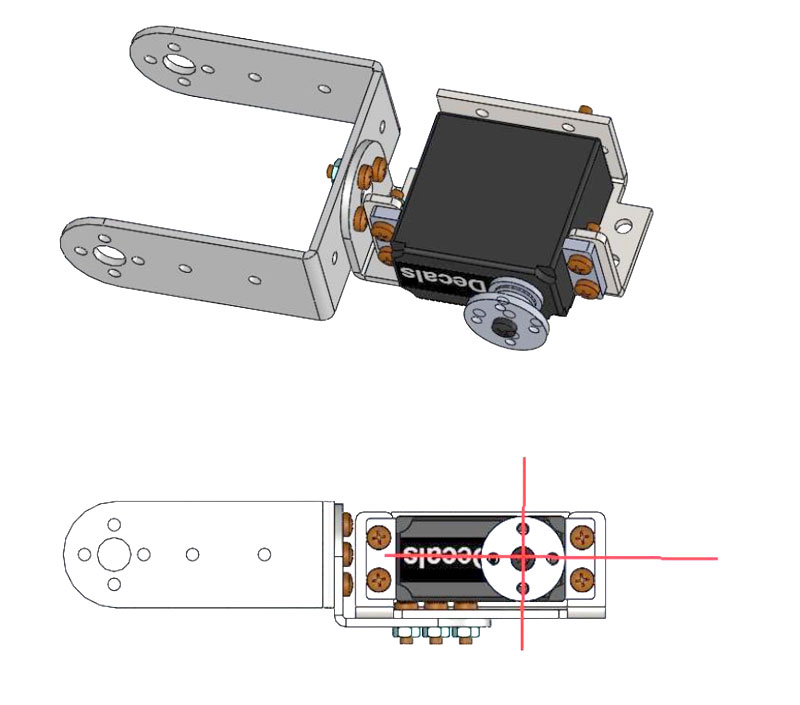
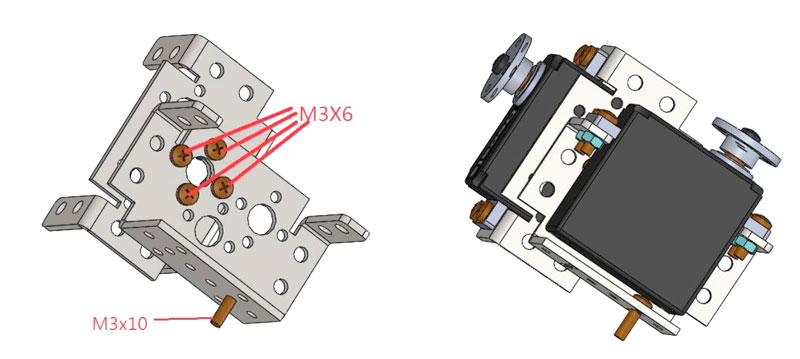
다음으로 서보모터의 메탈디스크에 멀티펑션 브라켓을 부착합니다.
조립된 멀티펑션 브라켓에 아래와 같이 M3x10 볼트를 끼워넣습니다. 이 볼트는 서보모터 구동축으로 사용됩니다.
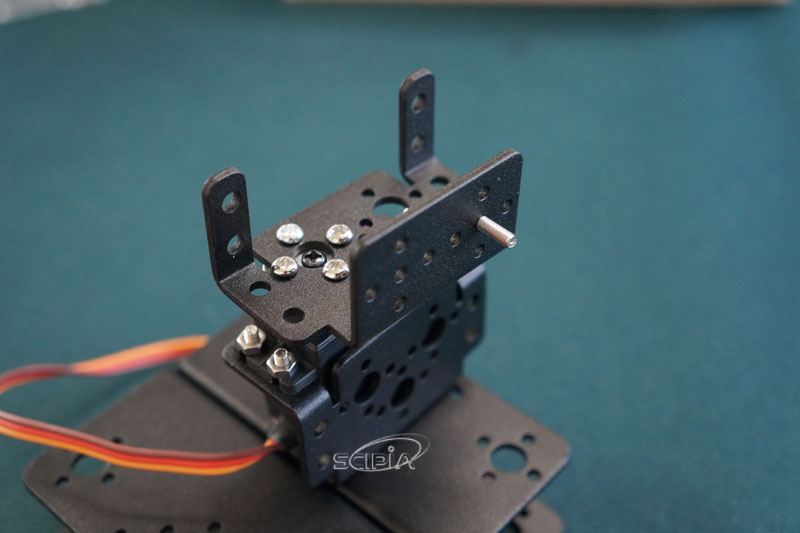
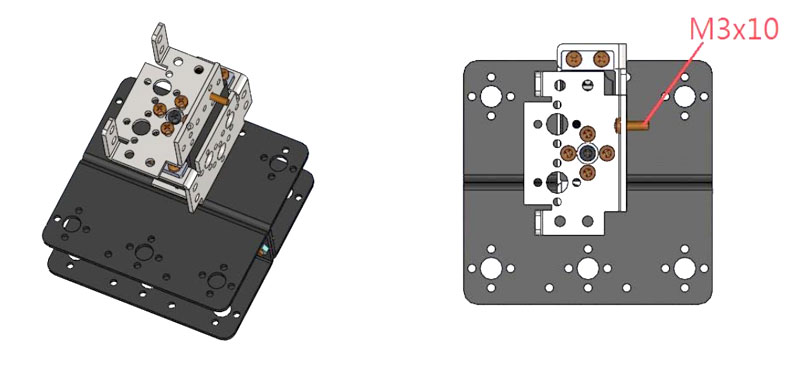
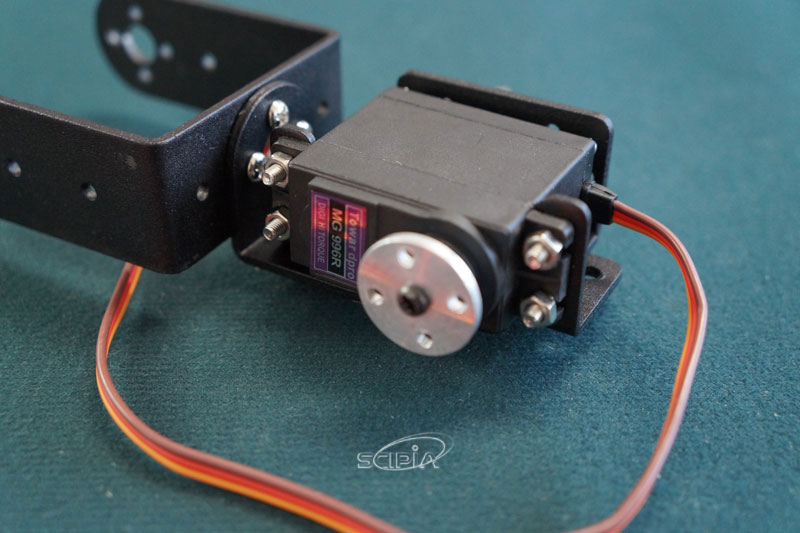
이제 서보모터를 멀티펑션 브라켓에 넣고 M3x10 볼트로 고정합니다.

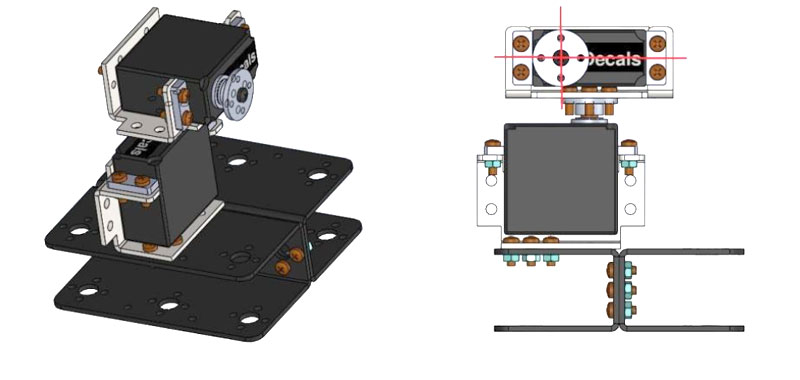
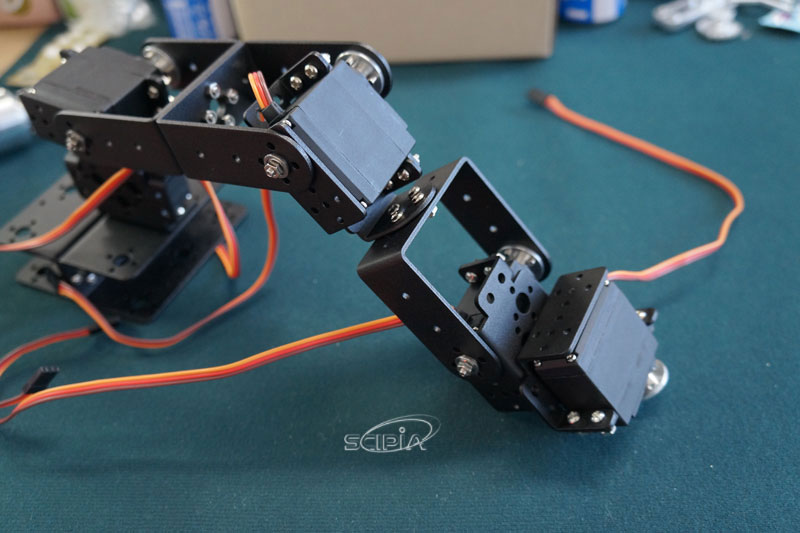
2개의 긴 U 브라켓을 M3x8 볼트를 사용하여 결합하고 서보모터의 고정축에 끼워넣습니다.


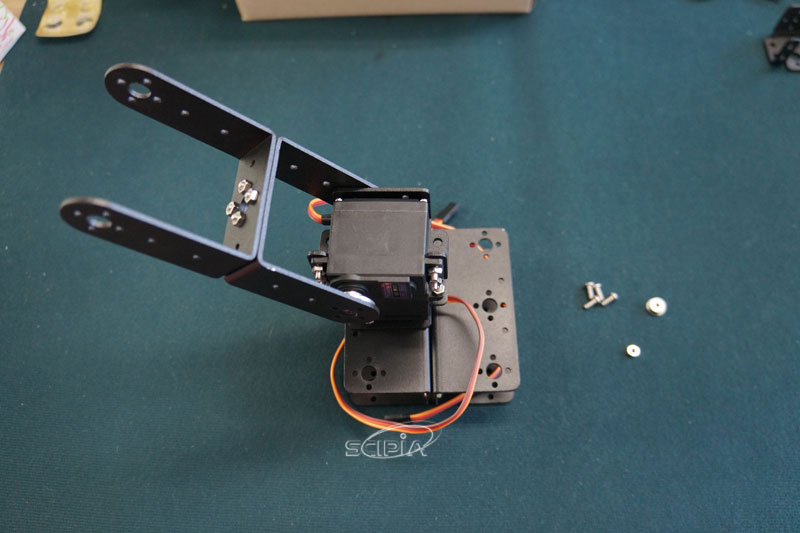
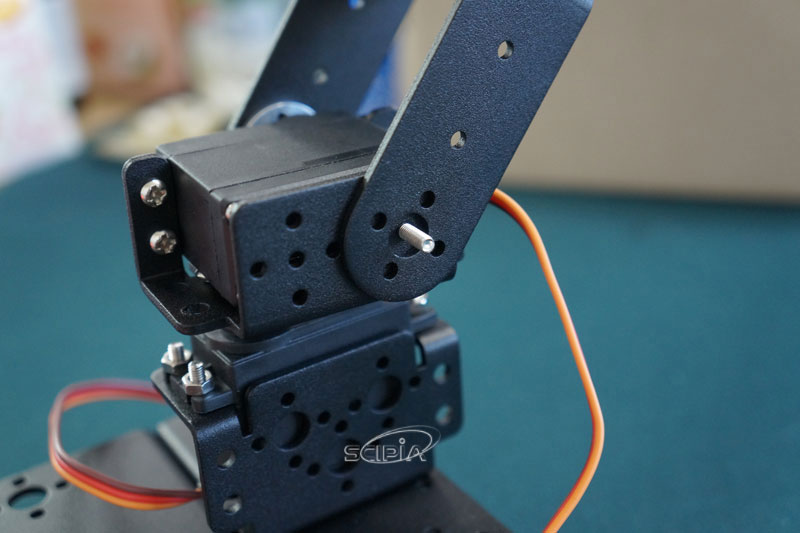
서보모터의 구동축에는 먼저 베이링을 끼워넣은 후 너트로 고정합니다.

서보모터 측은 M3x8 볼트로 메탈 디스크와 결합합니다.

다음은 U 브라켓과 L 브라켓을 M3x8 볼트와 너트로 결합합니다.

다음으로 M3x8 볼트와 너트로 멀티펑션 브라켓과 결합합니다. 서보모터 구동축으로 사용될 M3x10 볼트를 끼워넣습니다.

서보모터를 M3x8 볼트와 너트로 고정합니다.
서보모터 구동축에는 베어링을 넣고 너트로 고정하고 M3x8 볼트로 서보모터 메탈디스크와 결합합니다.
다음으로 M3x6 볼트로 2개의 멀터펑션 브라켓을 결합합니다.
서보모터 구동축으로 사용될 M3x10 볼트를 끼워넣습니다.
다음으로 2개의 서보모터를 조립합니다.
다음으로 아래와 같이 구동축은 베어링을 끼워넣고 너트로 고정하며 서모모터의 메탈디스크와 결합합니다.
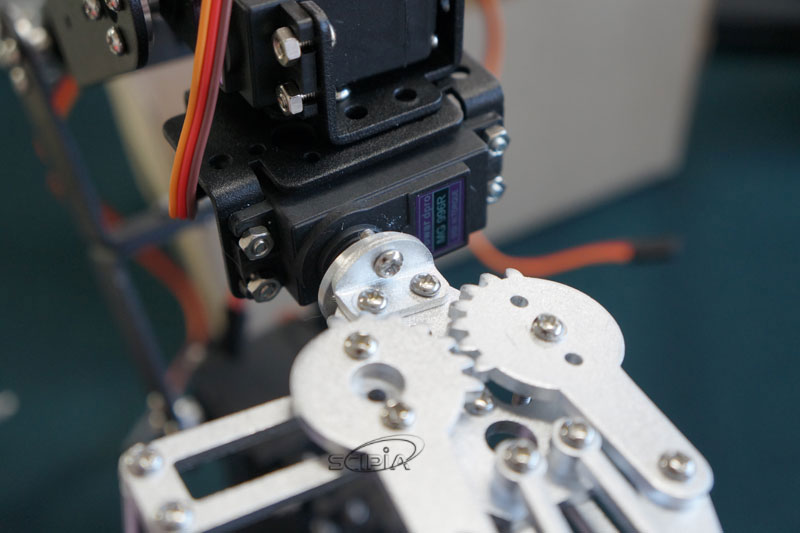
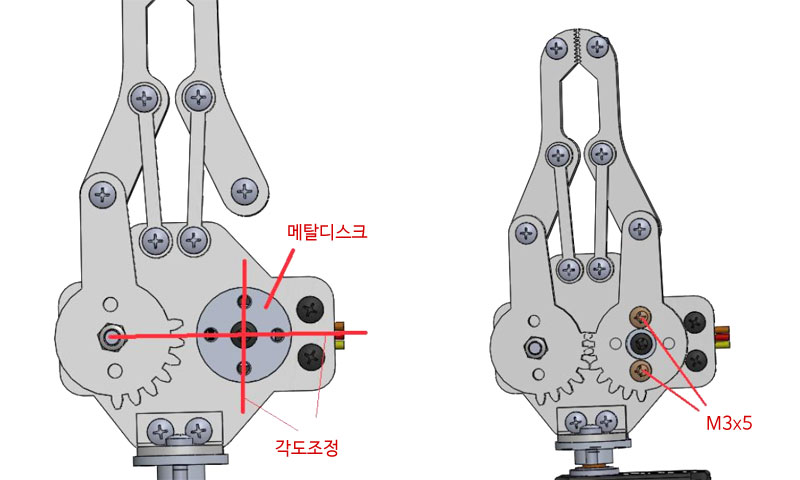
그립퍼를 조립하기 전에 아래 사진에서 적색으로 체크된 너트는 구동시 움직이는 부분으로 너무 단단하게 조이면 그립이 안되거나 모터에 무리가 가며, 너무 헐거우면 그립퍼의 이빨이 맞물리지 않게 됩니다.
일단 단단하게 조인다음 움직일 수 있도록 조금 풀어주면서 조임을 조절하면 됩니다.
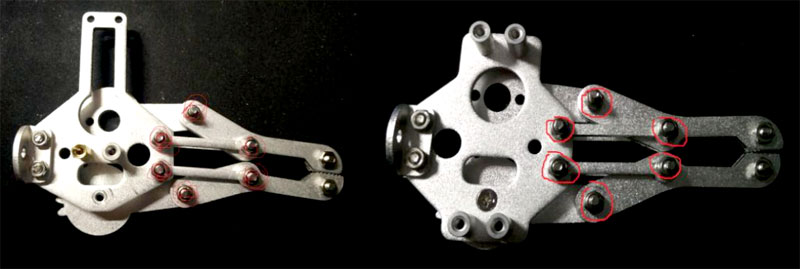
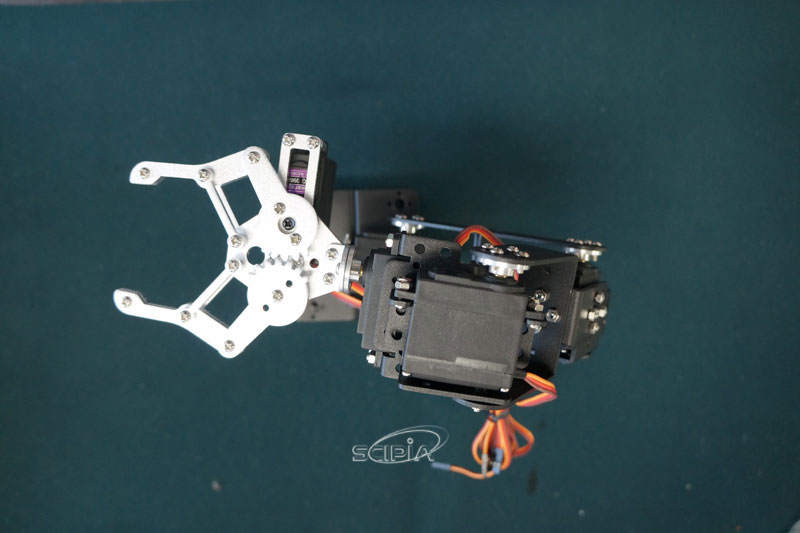
그립퍼를 M3x8 볼트로 조립합니다.
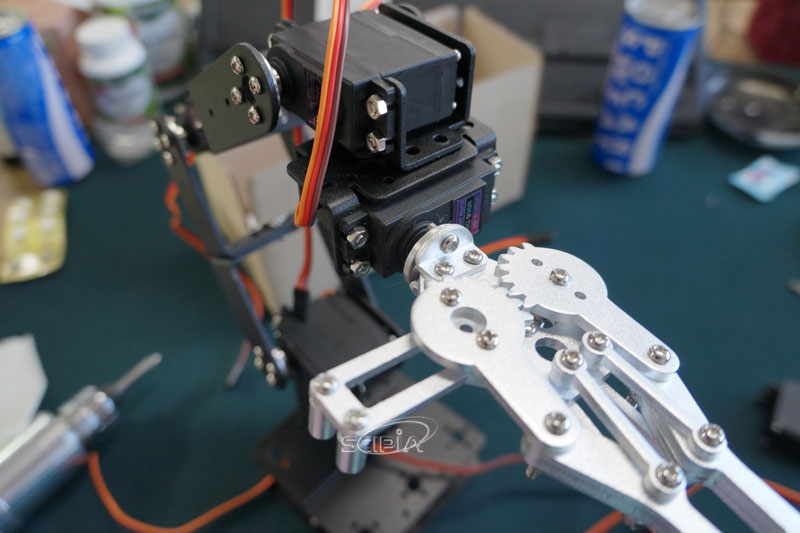
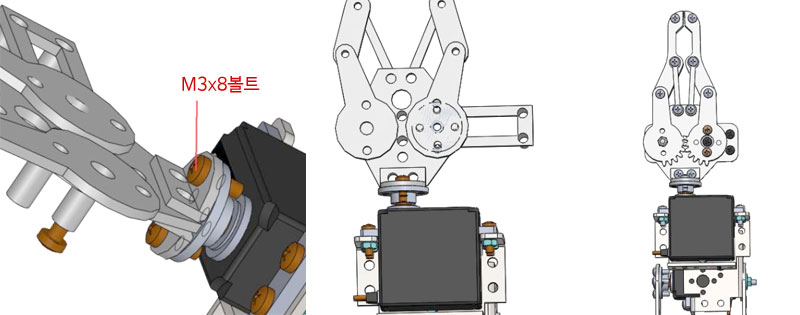
서보모터를 M3x8볼트로 그립퍼와 결합합니다.
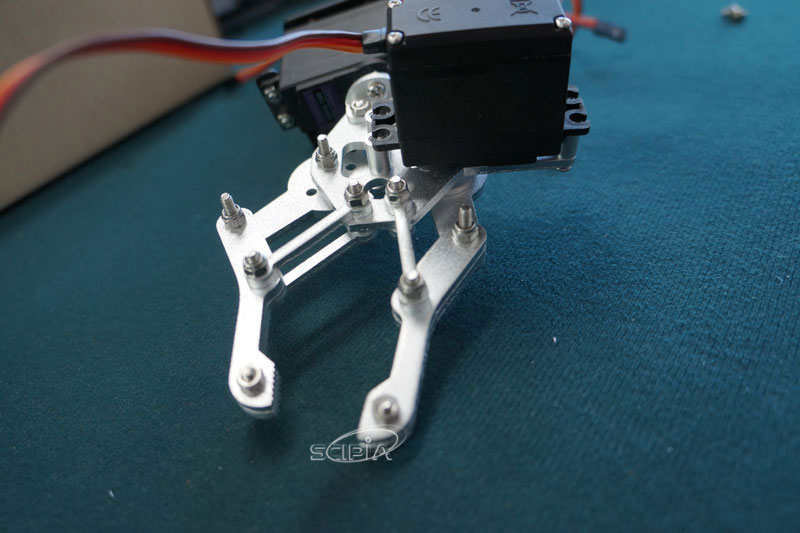
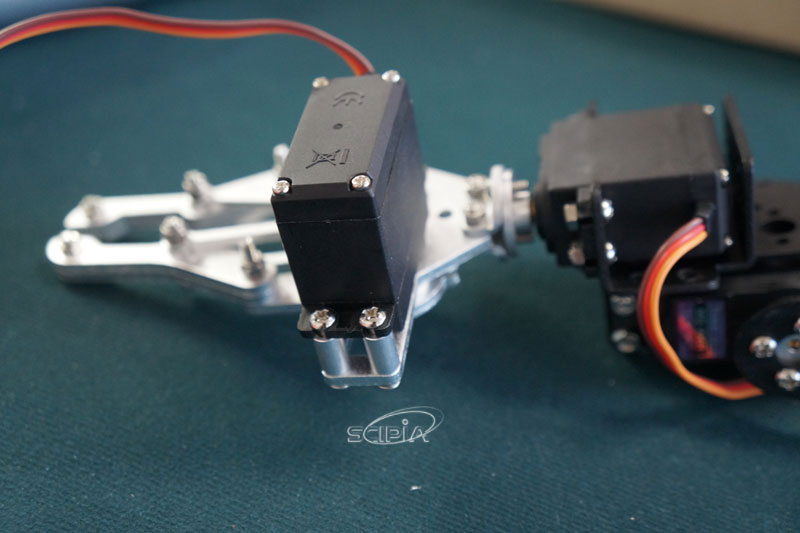
M3x5 볼트로 그립퍼와 서보모터의 메탈디스크 부를 결합합니다.
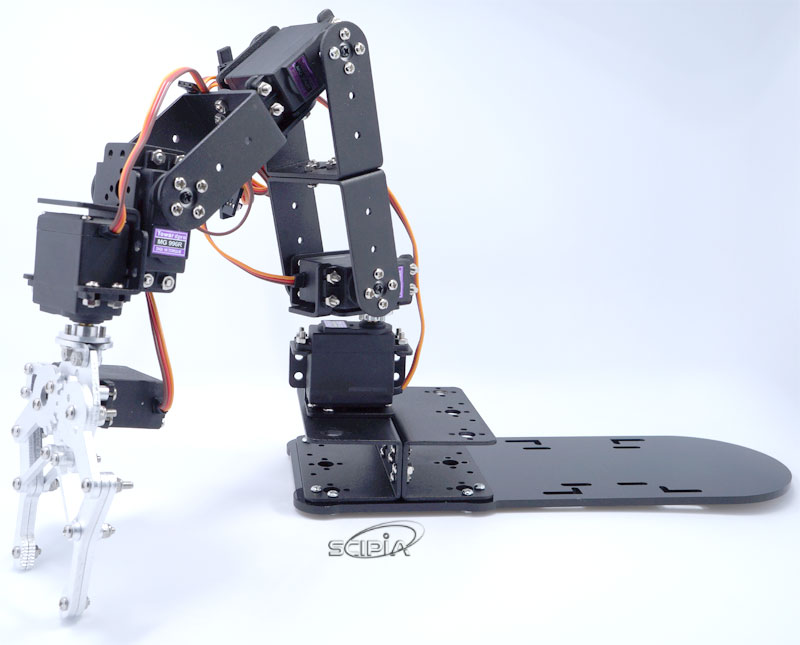
조립된 로봇팔을 아크릴 베이스판에 M3x8 이나 M3x10 볼트와 너트로 결합하면 조립이 완료됩니다.
-. 참고 영상
Author

scipia
싸이피아