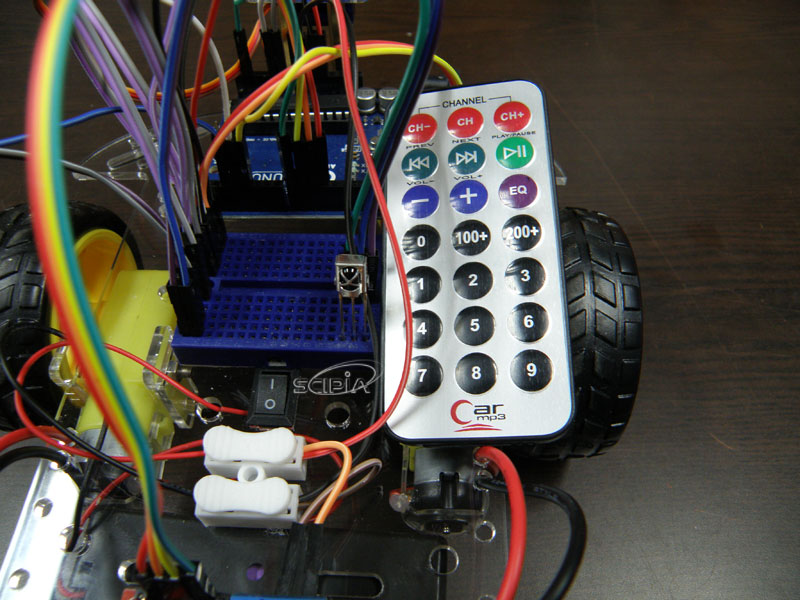
SPAC2 IR무선리모컨 주행실험

아두이노 우노를 이용한 2WD 자동차 스마트카 로봇 SPAC2입니다. SPAC1의 상위모델로 충전용 18650배터리 2개(7.4V)를 사용하여 강력한 구동이 가능하고 오랜 주행이 가능합니다. 여기서는 IR무선리모컨을 사용한 주행실험을 합니다.
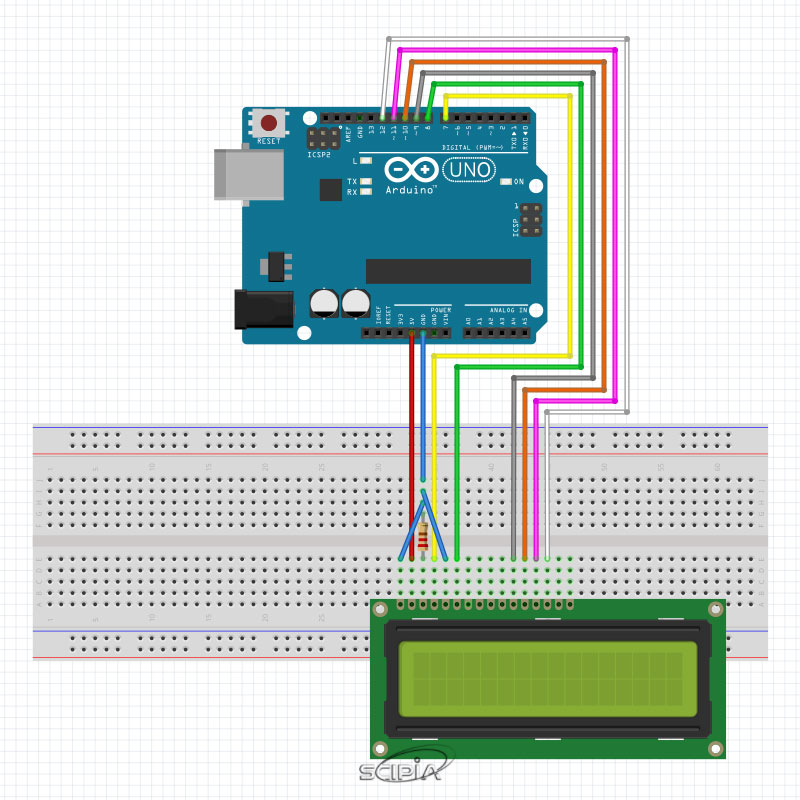
1. IR 수신센서 결선
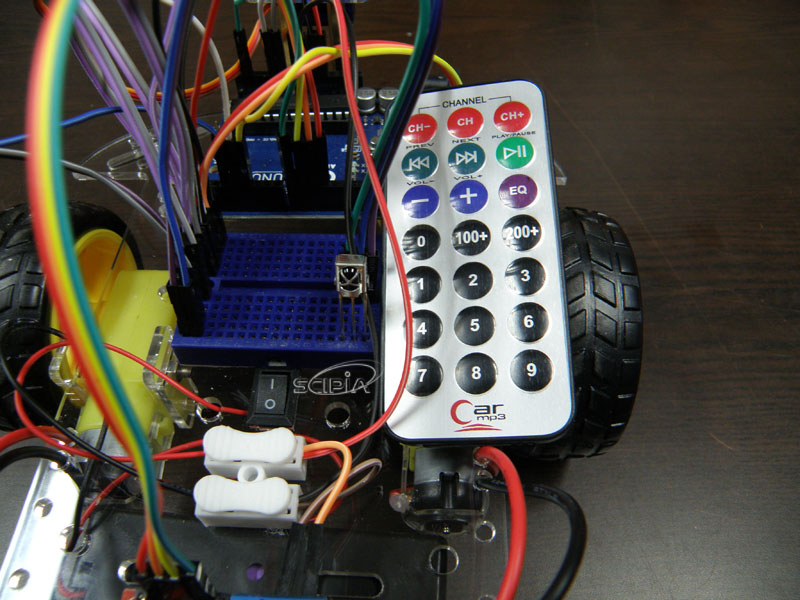
IR리모컨 적외선 수신센서를 브레드보드에 꼽고 아두이노 보드와 결선합니다.
- IR 수신센서 결선
VCC - 5V
GND - GND
SIGNAL - A4
2. 소스 및 주행실험
아래 링크에서 아두이노 보드용 라이브러리를 다운받아서 아두이노 IDE 소프트웨어가 설치된 디렉토리에서 하위 library 디렉토리에 IRremote라는 새폴더를 만든 후에 그 안에 붙여넣으시면 됩니다. 라이브러리를 붙여넣으신 후에 아두이노 IDE 소프트웨어는 종료 후 다시 실행하시면 되며, 메뉴에서 스케치->라이브러리 가져오기를 선택하면 라이브러리가 설치가 되었는지 확인할 수 있습니다.
라이브러리
소스코드
아래는 소스코드입니다. 아두이노 IDE에 붙여넣기 하여 컴파일하고 업로드합니다.
버튼기능은 다음과 같습니다.
2번 버튼 - 전진
8번 버튼 - 후진
4번 버튼 - 좌회전
6번 버튼 - 우회전
5번 버튼 - 정지
1번 버튼 - 좌스핀
3번 버튼 - 우스핀
// SPAC2 IR 리모컨 주행실험
#include <IRremote.h>//IR리모컨라이브러리
int RECV_PIN = A4;//포트설정
IRrecv irrecv(RECV_PIN);
decode_results results;//구조체정의
int on = 0;//플래그
unsigned long last = millis();
long run_car = 0x00FF18E7;//2번 버튼
long back_car = 0x00FF4AB5;//8번 버튼
long left_car = 0x00FF10EF;//4번 버튼
long right_car = 0x00FF5AA5;//6번 버튼
long stop_car = 0x00FF38C7;//5번 버튼
long left_turn = 0x00ff30CF;//1번 버튼
long right_turn = 0x00FF7A85;//3번 버튼
//==============================
int Left_motor_back=8; //좌측모터후진(IN1)
int Left_motor_go=9; //좌측모터전진(IN2)
int Right_motor_go=10; // 우측모터전진(IN3)
int Right_motor_back=11; // 우측모터후진(IN4)
void setup()
{
//모터구동을을 위한 초기화
pinMode(Left_motor_go,OUTPUT); // PIN 8 (PWM)
pinMode(Left_motor_back,OUTPUT); // PIN 9 (PWM)
pinMode(Right_motor_go,OUTPUT);// PIN 10 (PWM)
pinMode(Right_motor_back,OUTPUT);// PIN 11 (PWM)
pinMode(13, OUTPUT);//포트설정 출력
irrecv.enableIRIn(); // Start the receiver
}
void run() // 전진
{
digitalWrite(Right_motor_go,HIGH); //우측모터전진
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,HIGH); //좌측모터전진
digitalWrite(Left_motor_back,LOW);
}
void brake() //제동, 정지
{
digitalWrite(Right_motor_go,LOW);
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,LOW);
digitalWrite(Left_motor_back,LOW);
}
void left() //좌회전(좌측정지,우측직진)
{
digitalWrite(Right_motor_go,HIGH); //우측모터전진
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,LOW); //좌측모터정지
digitalWrite(Left_motor_back,LOW);
}
void spin_left() //좌측스핀(좌측후진,우측직진)
{
digitalWrite(Right_motor_go,HIGH); // 우측모터전진
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,LOW); //좌측모터후진
digitalWrite(Left_motor_back,HIGH);
}
void right() //우회전(우측정지, 좌측직진)
{
digitalWrite(Right_motor_go,LOW); //우측모터정지
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,HIGH);//좌측모터전진
digitalWrite(Left_motor_back,LOW);
}
void spin_right() //우측스핀(우측후진, 좌측전진)
{
digitalWrite(Right_motor_go,LOW); //우측모터후진
digitalWrite(Right_motor_back,HIGH);
digitalWrite(Left_motor_go,HIGH); //좌측모터전진
digitalWrite(Left_motor_back,LOW);
}
void back() //후진
{
digitalWrite(Right_motor_go,LOW);
digitalWrite(Right_motor_back,HIGH);
digitalWrite(Left_motor_go,LOW);
digitalWrite(Left_motor_back,HIGH);
}
void dump(decode_results *results)
{
int count = results->rawlen;
if (results->decode_type == UNKNOWN)
{
brake();
}
}
void loop()
{
if (irrecv.decode(&results)) //IR리모컨 라이브러리 호출
{
if (millis() - last > 250) //수신신호 결정
{
on = !on;//수신신호 반전
digitalWrite(13, on ? HIGH : LOW);//수신신호를 LED(13)로 표시
dump(&results);//수신신호 디코딩
}
if (results.value == run_car )//2번 버튼
run();//전진
if (results.value == back_car )//8번 버튼
back();//후진
if (results.value == left_car )//4번 버튼
left();//좌회전
if (results.value == right_car )//6번 버튼
right();//우회전
if (results.value == stop_car )//5번 버튼
brake();//정지
if (results.value == left_turn )//1번 버튼
spin_left();//좌스핀
if (results.value == right_turn )//3번 버튼
spin_right();//우스핀
last = millis();
irrecv.resume(); // Receive the next value
}
}
Topic:
Author

scipia
싸이피아