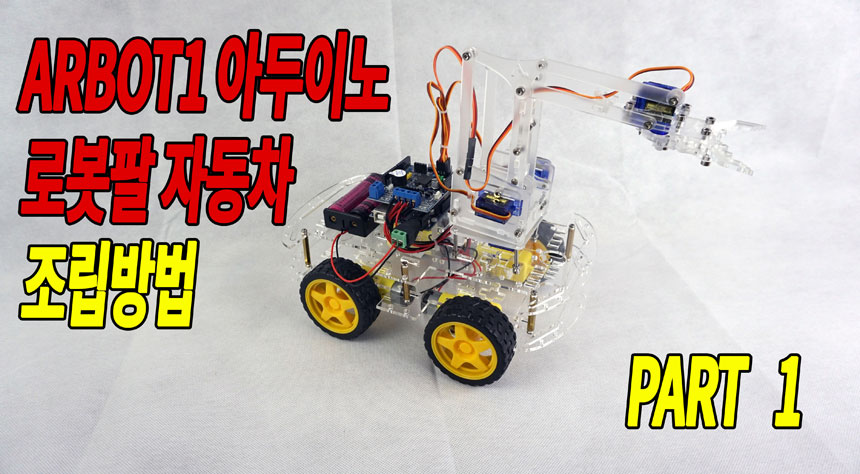
ARBOT1 아두이노 4자유도 로봇팔자동차 조립방법 1
ARBOT1은 아두이노 4자유도 로봇팔과 4WD자동차가 결합된 스마트카로봇입니다. 아크릴 4자유도 로봇과 4WD 차대와 결합하여 자동차 주행 및 로봇팔 구동실험을 할 수 있습니다. 18650 배터리 2개를 사용하여 강력한 구동으로 장시간 사용이 가능합니다.
안드로이드폰과 블루투스로 연결하여 제어가 가능합니다. 안드로이드 플레이스토어에서 앱을 다운받아 사용하시면 됩니다.
- ARBOT1 조립 동영상 1
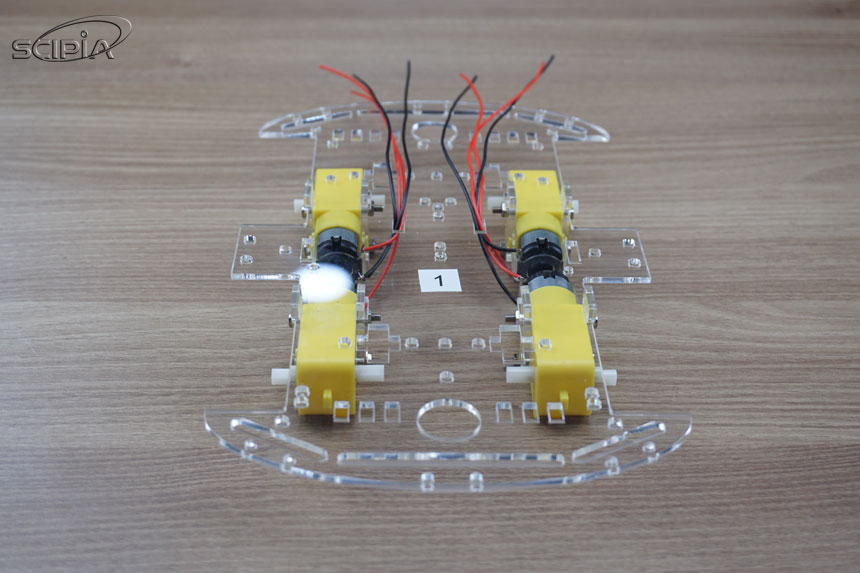
PART1 - 차대 1번 조립
PART1에서는 모터박스를 결선하고 차대 1번에 조립합니다.
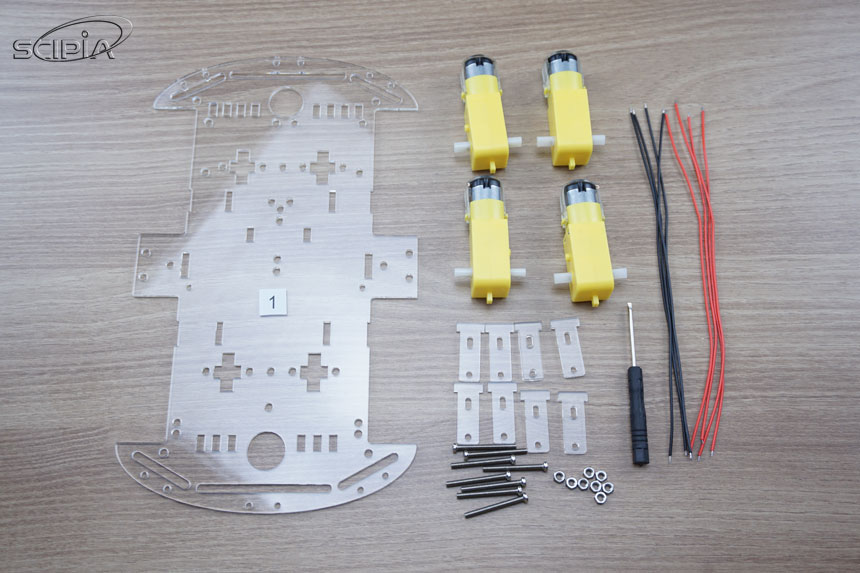
1. 전체 구성품
PART 1 조립을 위한 구성품은 아래와 같습니다.
필요에 따라 별도로 추가 스크류 드라이버와 글루건, 니퍼, 롱노즈 드의 공구와 인두기가 있으면 조립에 도움에 될 수 있습니다.
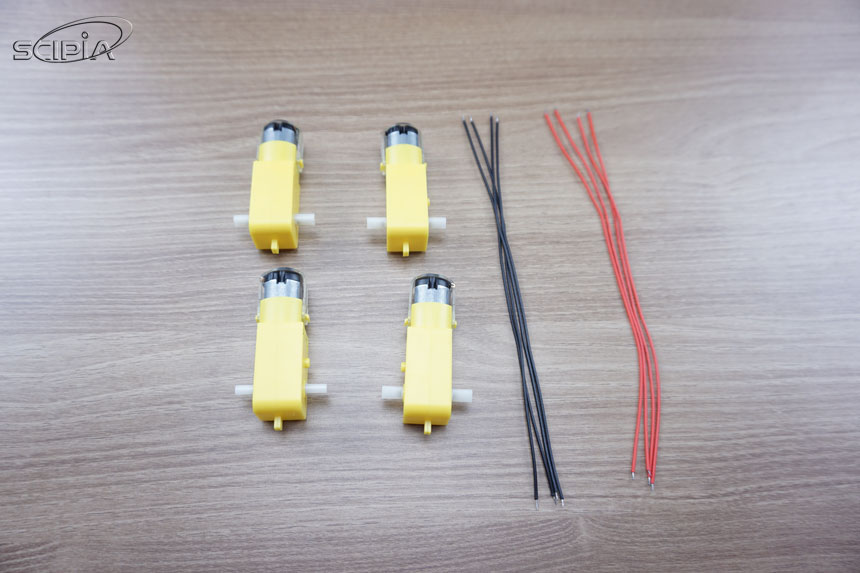
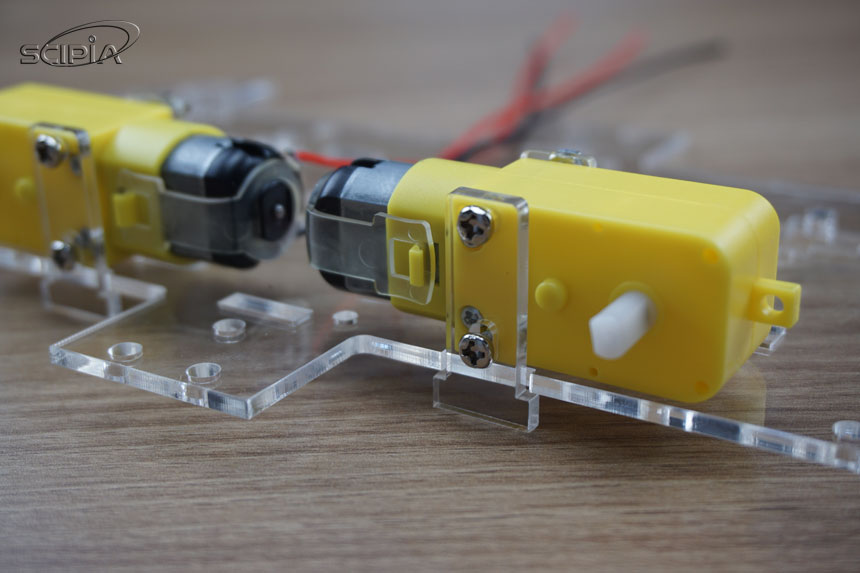
2. 모터박스 결선
총 4개의 모터박스에 선을 연결하게 됩니다.
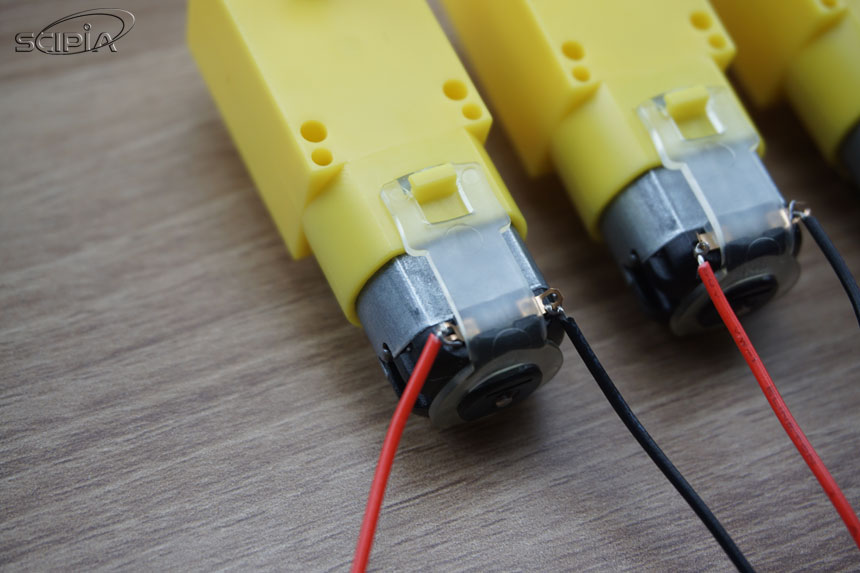
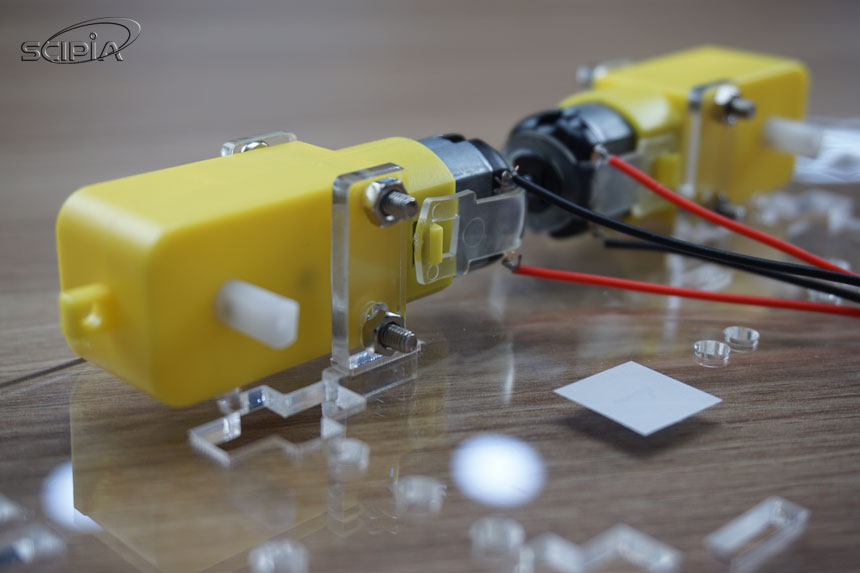
아래와 같이 모터박스에 있는 2개의 단자에 빨간선과 검정선을 넣어 묶어줍니다. 글루건이나 납땜으로 마무리하면 좋습니다.
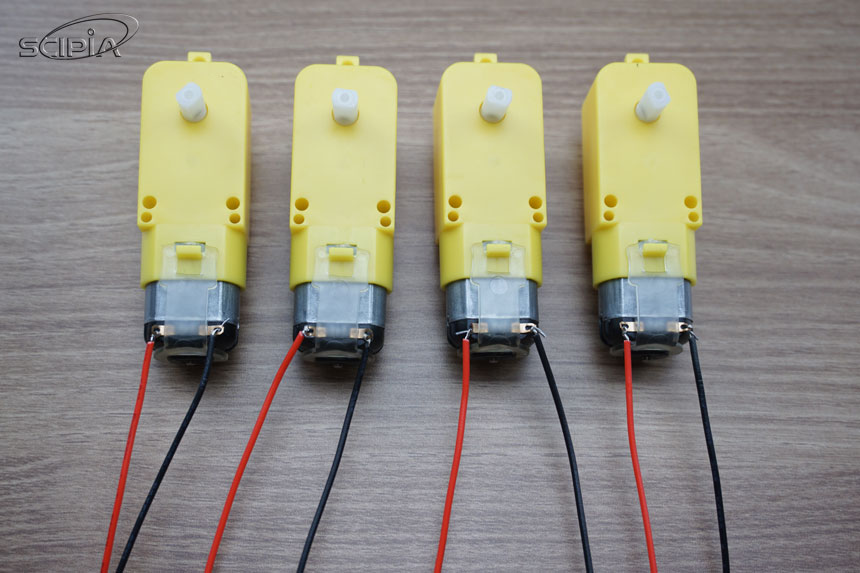
결선이 완료된 모터박스를 차대에 조립합니다.
차대 1번의 조립이 완료되었습니다.
Topic:
Author

scipia
싸이피아