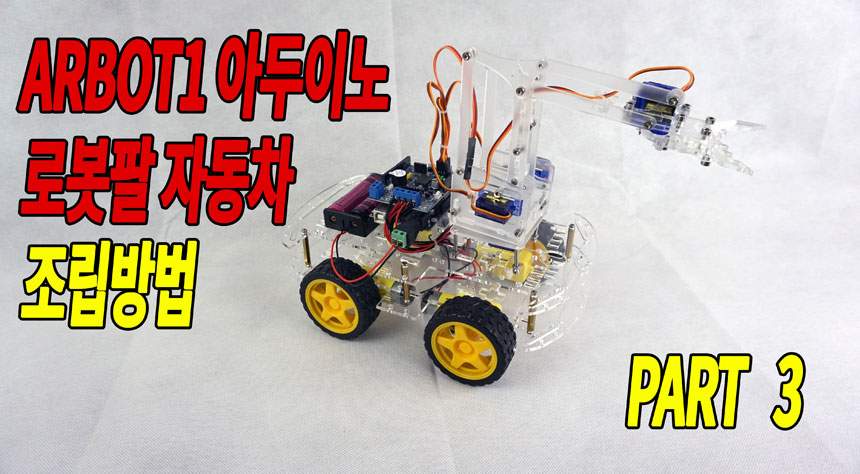
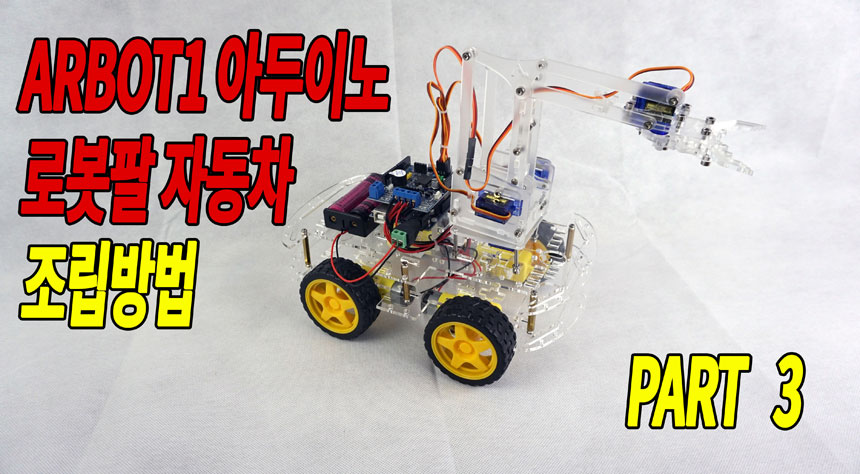
ARBOT1 아두이노 4자유도 로봇팔자동차 조립방법 3
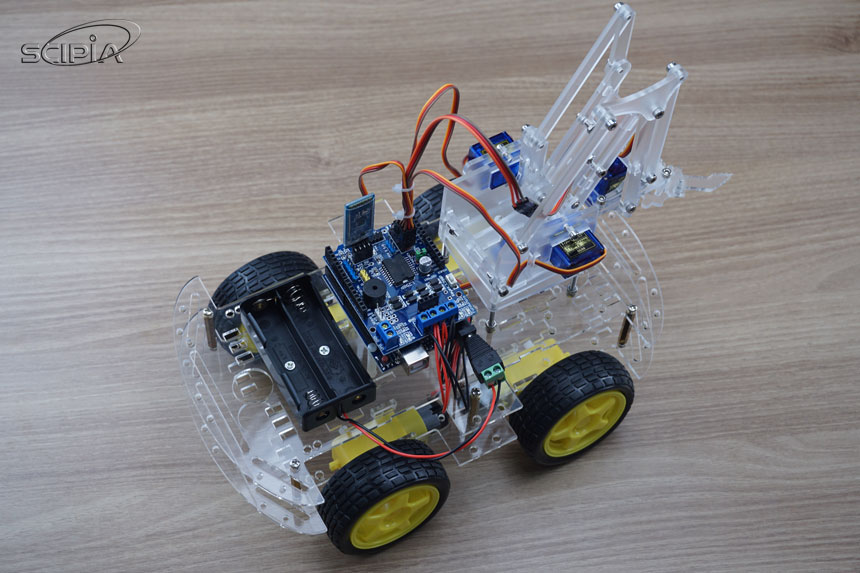
ARBOT1은 아두이노 4자유도 로봇팔과 4WD자동차가 결합된 스마트카로봇입니다. 아크릴 4자유도 로봇과 4WD 차대와 결합하여 자동차 주행 및 로봇팔 구동실험을 할 수 있습니다. 18650 배터리 2개를 사용하여 강력한 구동으로 장시간 사용이 가능합니다.
PART3에서는 차대1번과 차대2번을 결합하고 결선을 마무리하여 로봇팔자동차를 완성하게 됩니다.
안드로이드폰과 블루투스로 연결하여 제어가 가능합니다. 안드로이드 플레이스토어에서 앱을 다운받아 사용하시면 됩니다.
- ARBOT1 조립 동영상 3
PART3 - 최종 조립 및 결선
PART3에서는 차대1번과 차대2번을 결합하고 결선을 마무리하여 로봇팔자동차를 완성하게 됩니다.
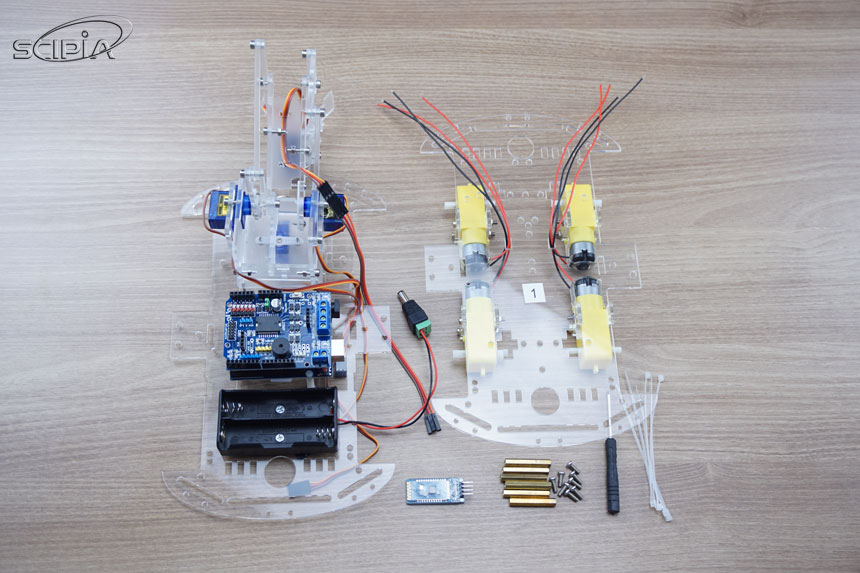
1. 조립 구성품
PART 2 조립을 위한 구성품은 아래와 같습니다.
앞서 조립한 차대1번과 차대2번이 필요하며 블루투스 모듈을 준비해야 합니다.
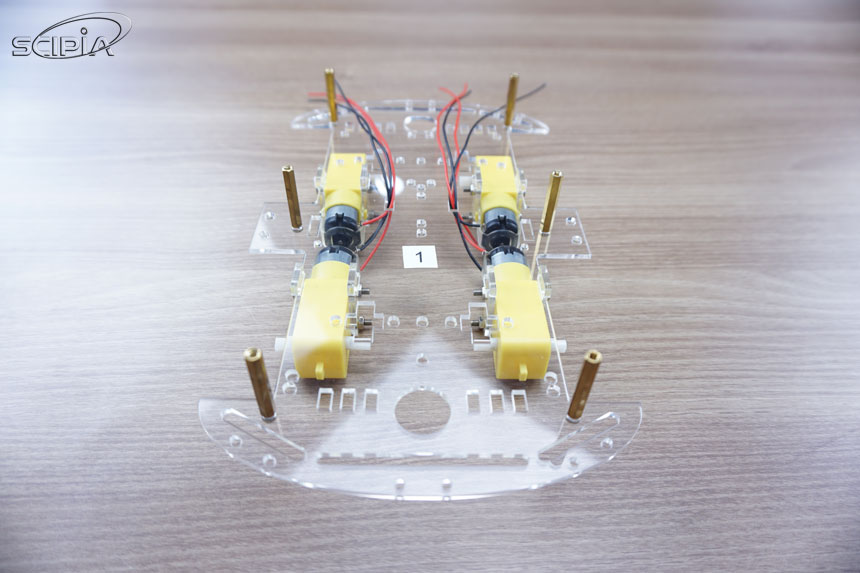
2. 차대 결합용 부품 조립
아래와 같이 총 4개의 스페이서와 볼트를 차대1번에 조립합니다.
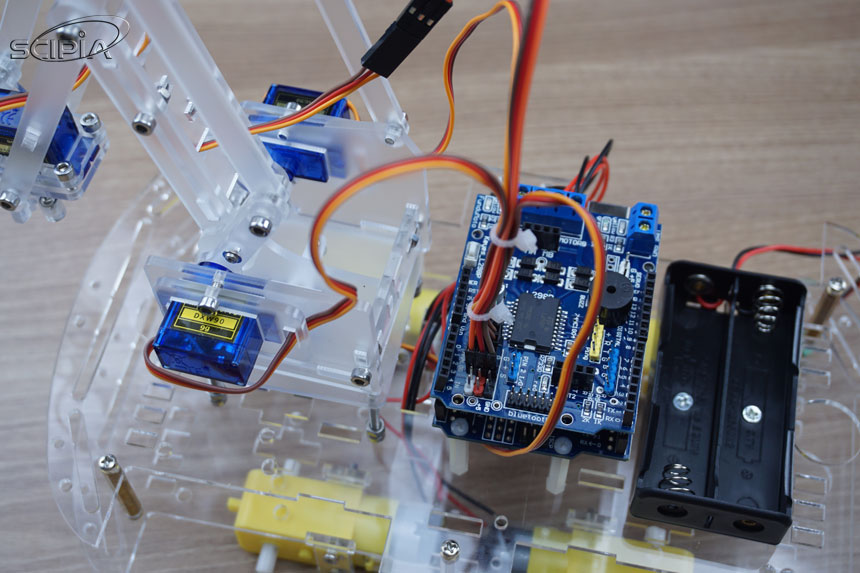
모터박스에 연결된 전선을 아래와 같이 모터드라이버보드에 연결합니다. 연결하실 때는 우측 검정선 2개, 우측 빨간선 2개, 좌측 빨간선 2개, 좌측 검정선 2개 순서로 합니다.
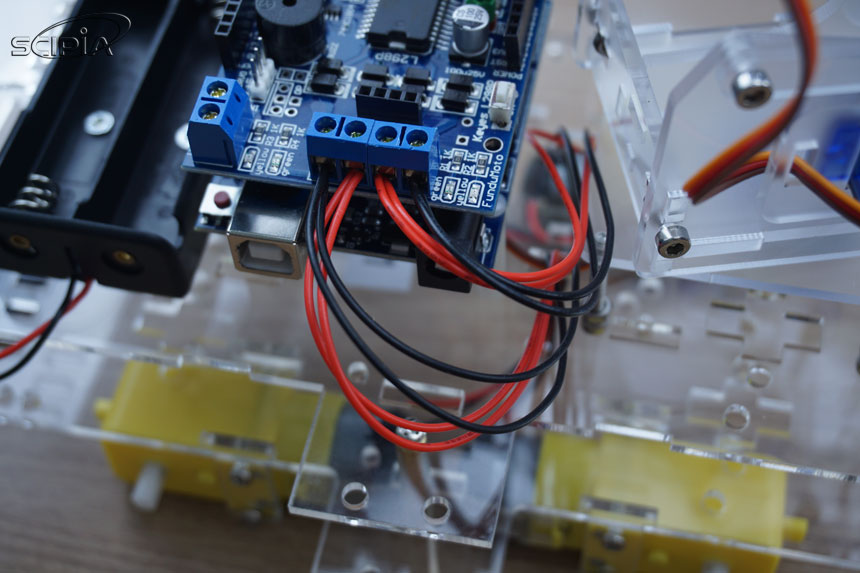
로봇팔 구동시 좌후회전에 걸리지 않도록 선을 아래쪽으로 하여 케이블타이로 묶어줍니다.
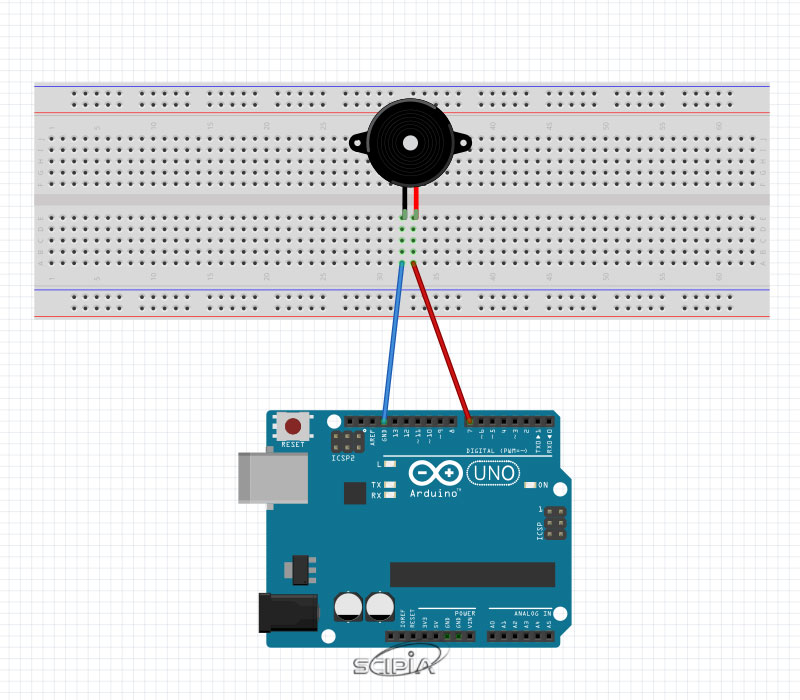
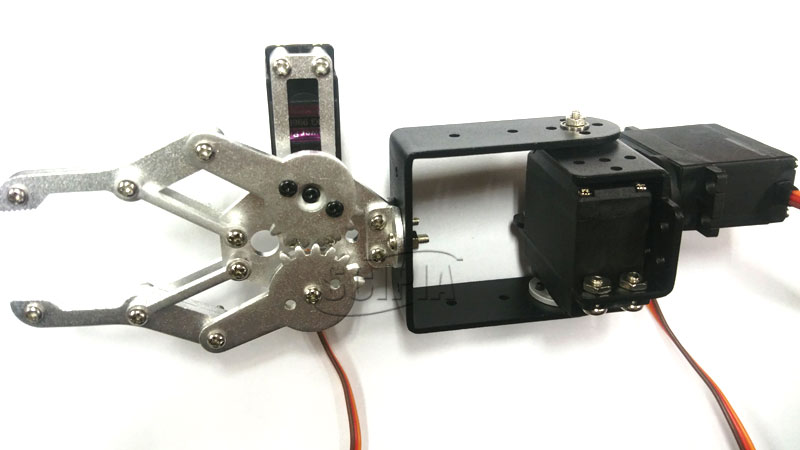
로봇팔 서보모터 4개를 모터드라이버보드에 있는 확장핀에 연결합니다. A3, A2, A1, A0 순서로 하며 그립퍼, 좌측(어깨축), 우측(팔꿈치축), 좌우회전 서보모터 순입니다.
그립퍼의 서보모터 케이블이 짧으므로 3핀 암수 연장선을 사용하여 선을 연장합니다. 서보모터의 3핀은 신호선(주황색), +5V(빨간색), GND(검정색) 순이며 순서가 바뀌어 꼽지않도록 주의합니다.
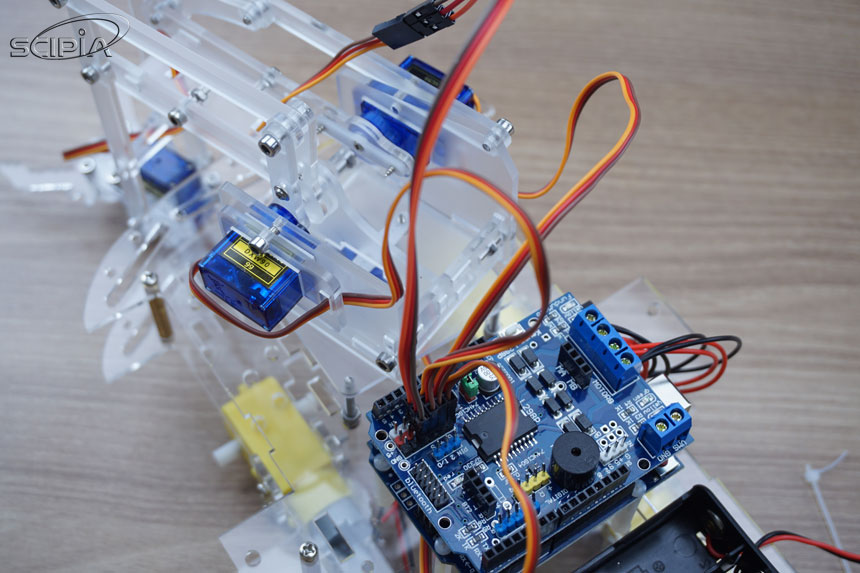
케이블 타이를 사용하여 서보모터선을 묶어줍니다.
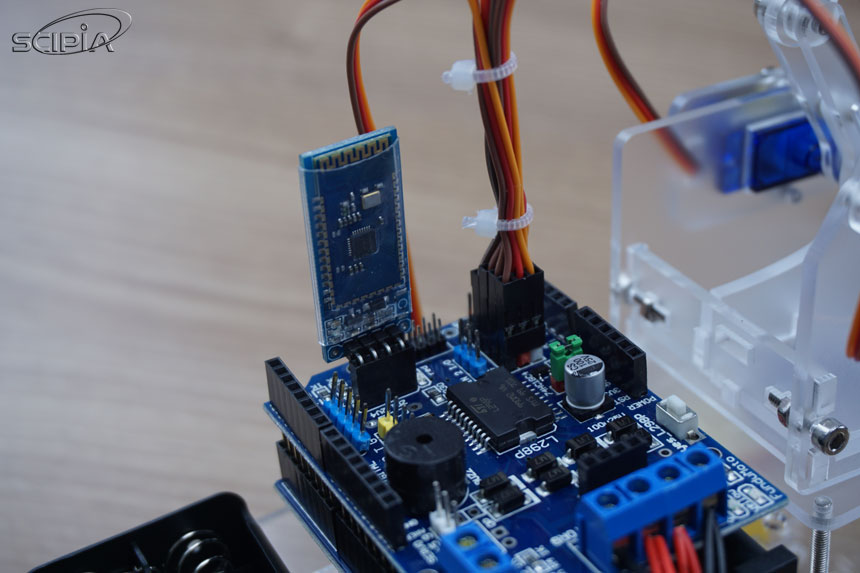
블루투스 모듈은 아래와 같이 꼽습니다. 방향이 반대가 되지 않도록 주의합니다.
아두이노보드에 프로그램을 업로드하는 경우에는 반드시 블루투스모듈을 뽑아놓아야 합니다. 블루투스 모듈과 USB 통신포트가 충돌하므로 블루투스모듈을 뽑지 않고 업로드하면 오류가 납니다.
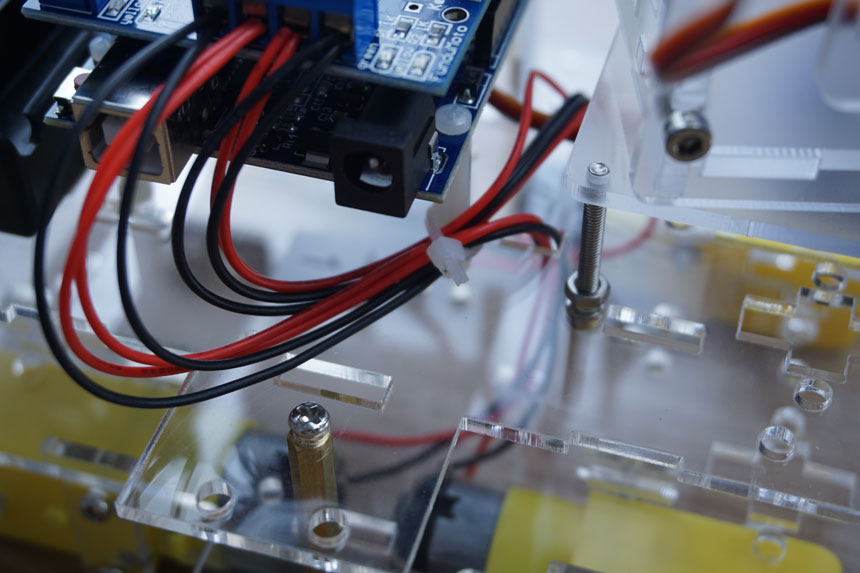
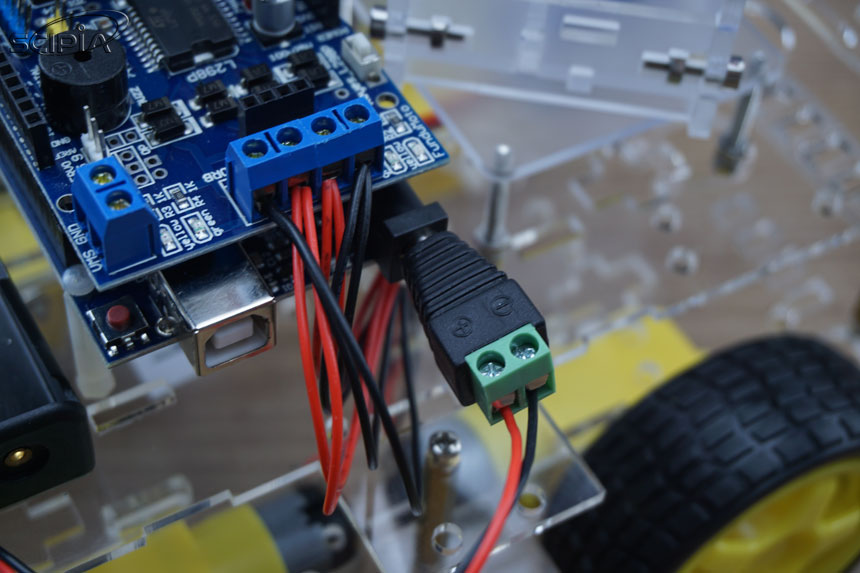
구동시에는 아래와 같이 아두이노 보드에 DC잭을 꼽으면 됩니다. 별도의 스위치가 없으므로 사용하지 않는 경우에는 반드시 뽑아놓아야 합니다.
아래는 최종 조립이 완료된 로봇팔자동차입니다.
Author

scipia
싸이피아