SPAC1 아두이노 2WD 자동차 스마트카 로봇 PART1
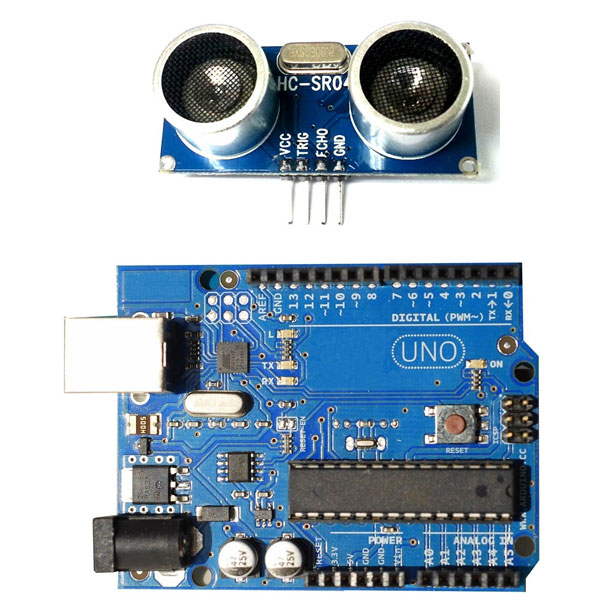
아두이노 우노를 이용한 2WD 자동차 스마트카 로봇입니다. 아두이노 우노보드를 이용하여 최소의 구성으로 스마트카를 구현해 볼 수 있습니다. 초음파센서를 사용하여 장애물을 감지하고 모터 구동을 위하여 L298N 보드를 사용합니다.
PART1 - SPAC1 차체 조립 및 결선편
SPAC1 아두이노 자동차는 아두이노 우노 보드를 사용하여 2바퀴 구동의 스마트카를 구성한 조립키트로서 최소한의 부품으로 구성하여 조립이 간단합니다. 초음파센서로 장애물을 감지하고 회피하며, 2바퀴 모터 구동을 위해 L298N 모터 드라이브 모듈을 사용합니다. PART1에서는 차체조립 및 부품간의 결선법에 대해 설명합니다.
1. 전체 구성품
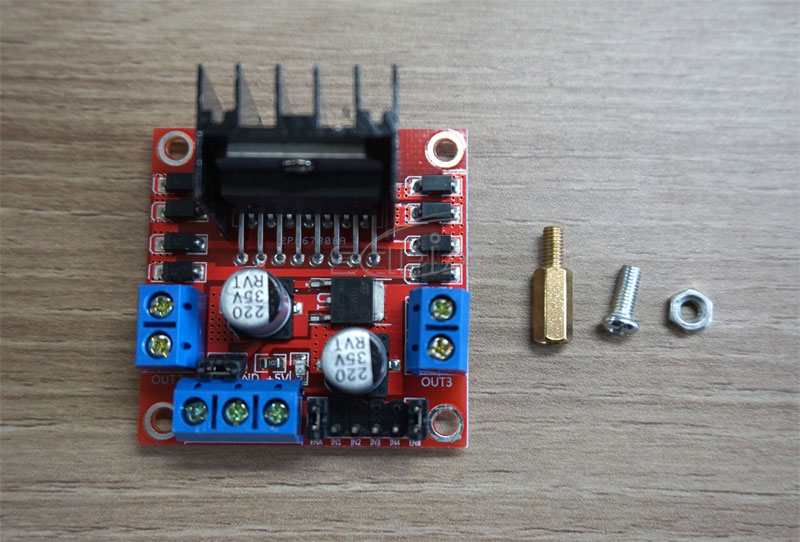
SPAC1 아두이노 자동차 키트의 전체 구성품은 아래 사진과 같습니다. 필요에 따라 별도로 추가 스크류 드라이버와 글루건, 양면테이프를 사용하시면 조립에 도움에 될 수 있습니다.


2. 차체 조립 및 결선
- 초음파센서 브라켓 조립

센서 브라켓의 보호필름을 벗긴 후 플라스틱 스페이서를 2개씩 이어 붙이고 2세트를 조립한 후 볼트를 이용하여 센서 브라켓에 고정합니다.

초음파센서는 2개의 원형홀에 밀어서 밀착 시키면 됩니다. 단단히 고정시키려면 글루건을 이용하시면 됩니다.
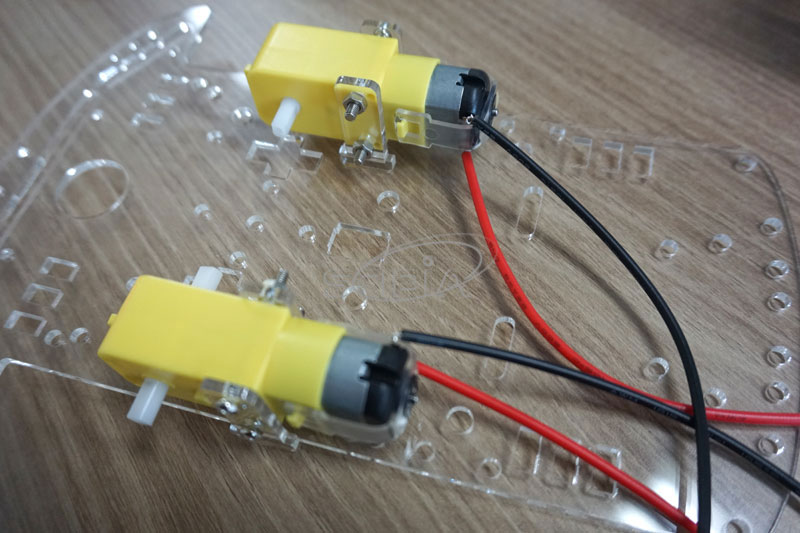
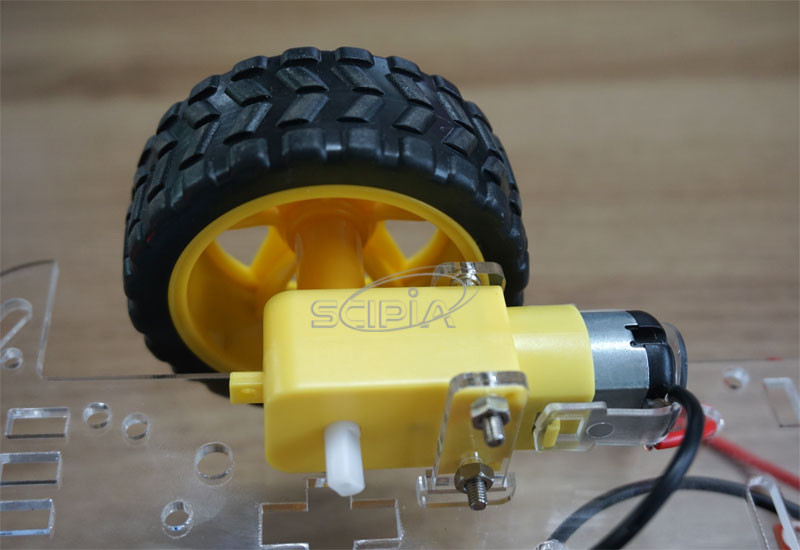
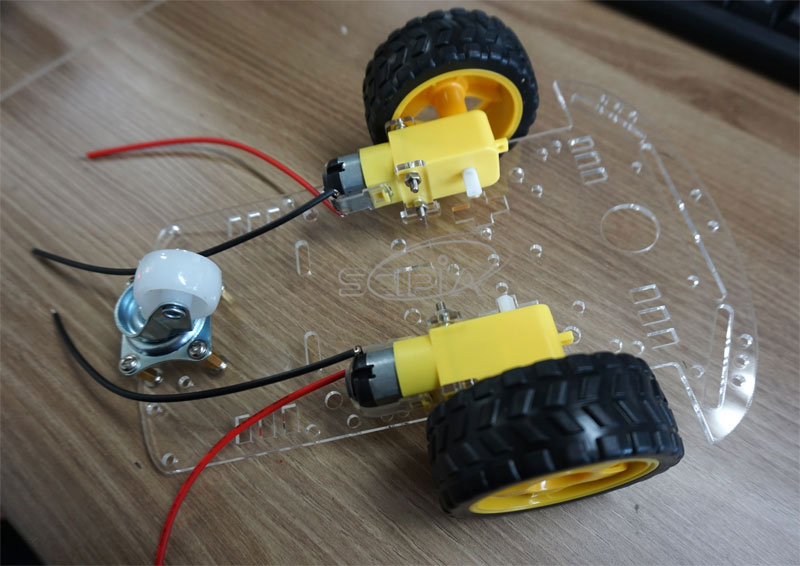
- 구동 모터박스 조립
먼저 모터 박스에 전선을 연결한 후 고정용 브라켓 2개와 볼트/너트로 고정시키시면 됩니다.
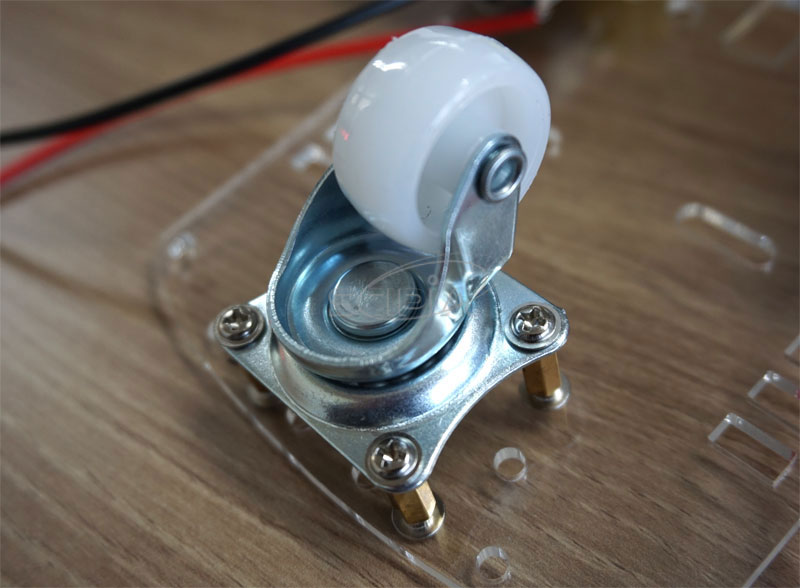
- 볼케스터 부착
볼케스터와 차체 사이에 철제 스페이서를 두고 양쪽으로 볼트를 이용하여 조립하시면 됩니다.
홀이 맞지 않으면, 반대편 볼트를 살짝푼 후 맞추면 됩니다.
- 바퀴 조립
바퀴는 모터 박스의 바퀴홀에 끼워 넣으시면 됩니다.
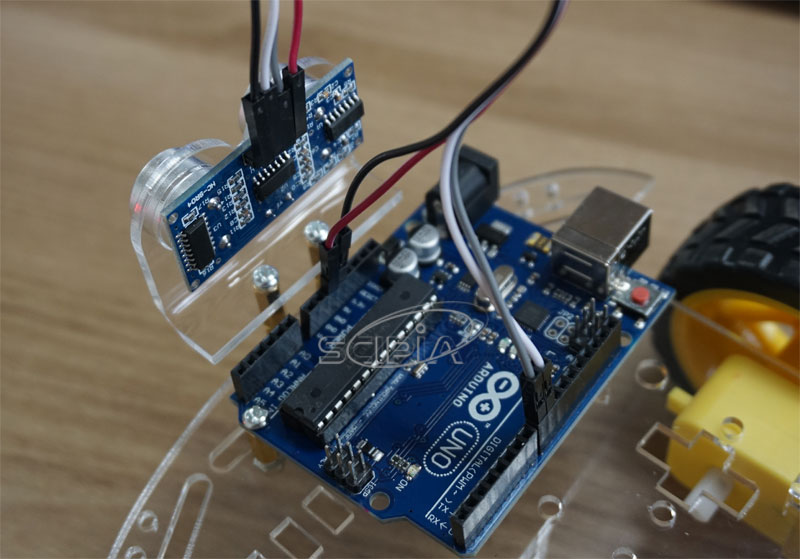
- 초음파센서 브라켓부 부착
앞에서 조립한 초음파센서 브라켓부를 너트로 차체와 결합합니다.

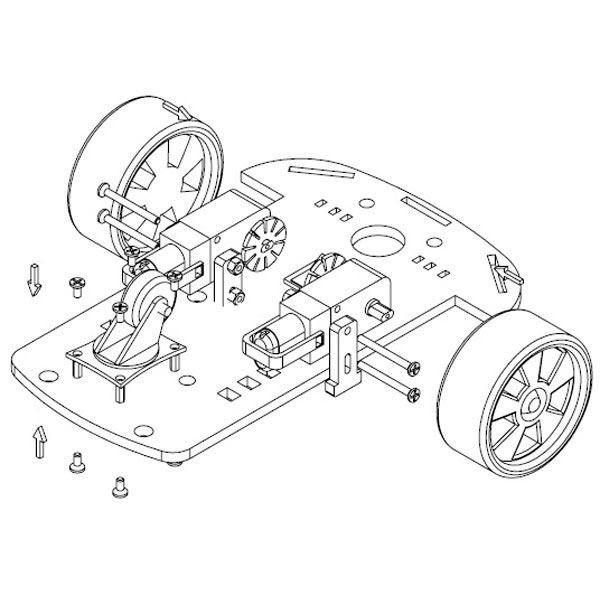
아래는 참고용 전체 차체 조립도입니다.
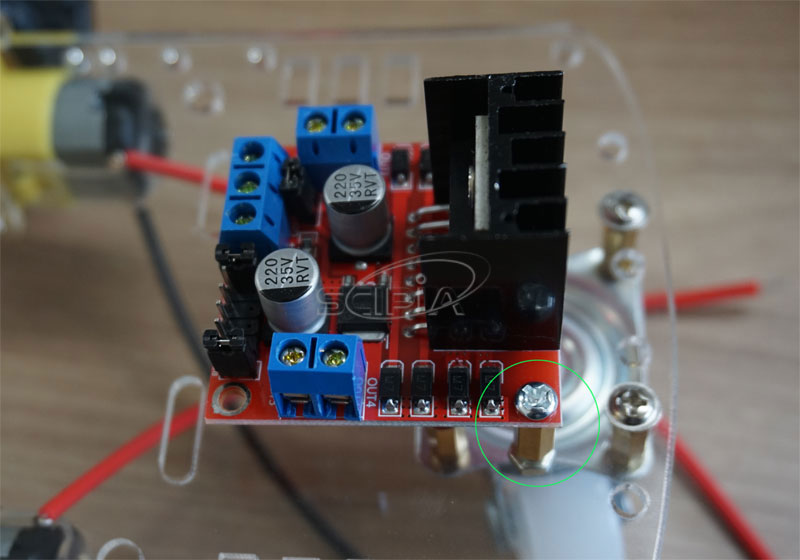
- 아두이노 보드, L298N 모터드라이브 보드 고정

아래와 같이 한쪽만 고정시킵니다.
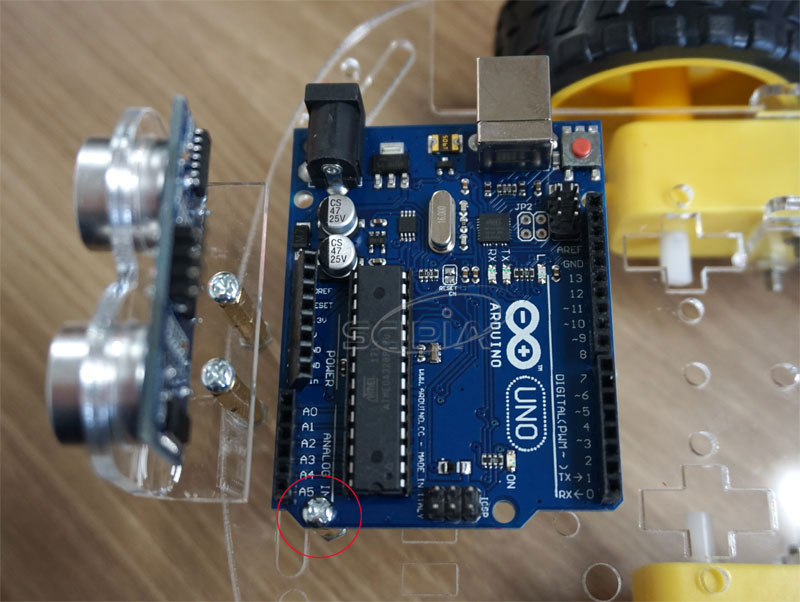
홀에 맞추어 한쪽만 고정시킵니다.
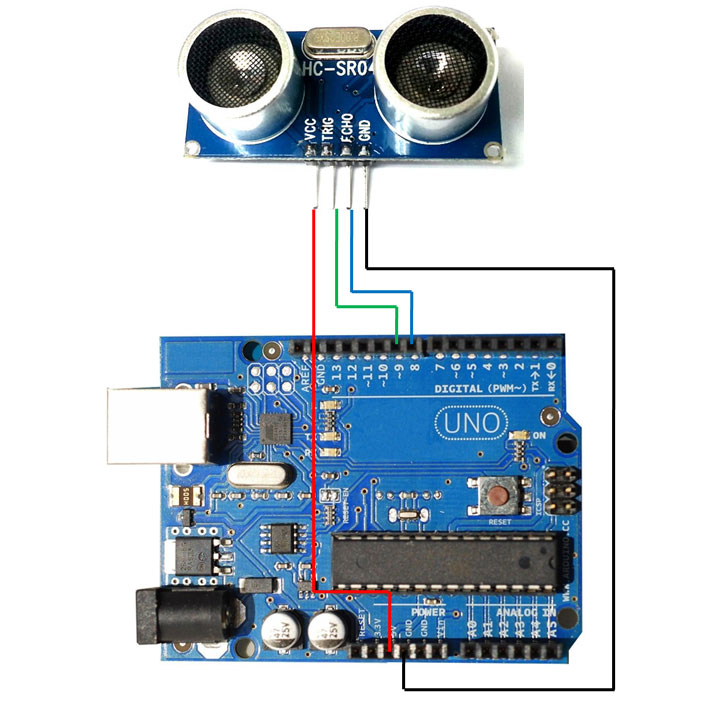
- 초음파센서 결선
초음파센서와 아두이노 우노 보드와의 결선법입니다. 초음파센서의 VCC는 아두이노 우노보드의 5V, GND는 GND와 결선하시면 됩니다. 초음파센서의 TRIG는 아두이노 우노보드의 디지털IO 9, ECHO는 디지털IO 8에 결선합니다.
- L298N 모터드라이브 보드 결선
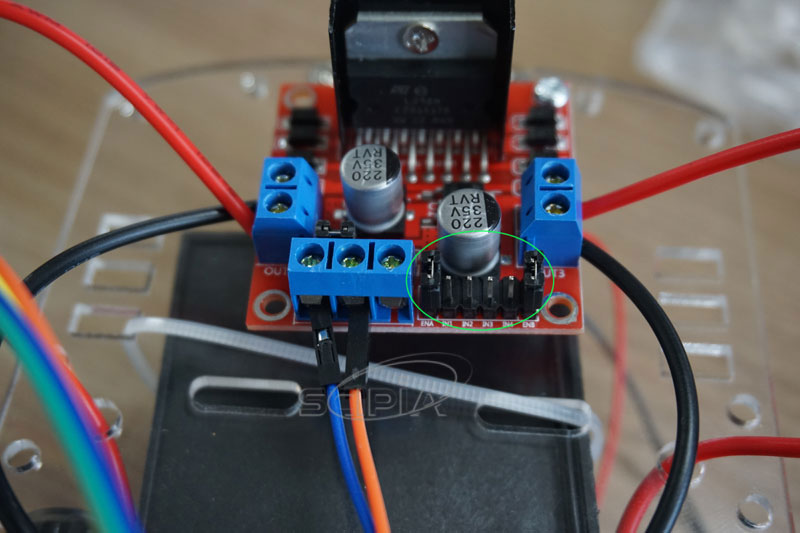
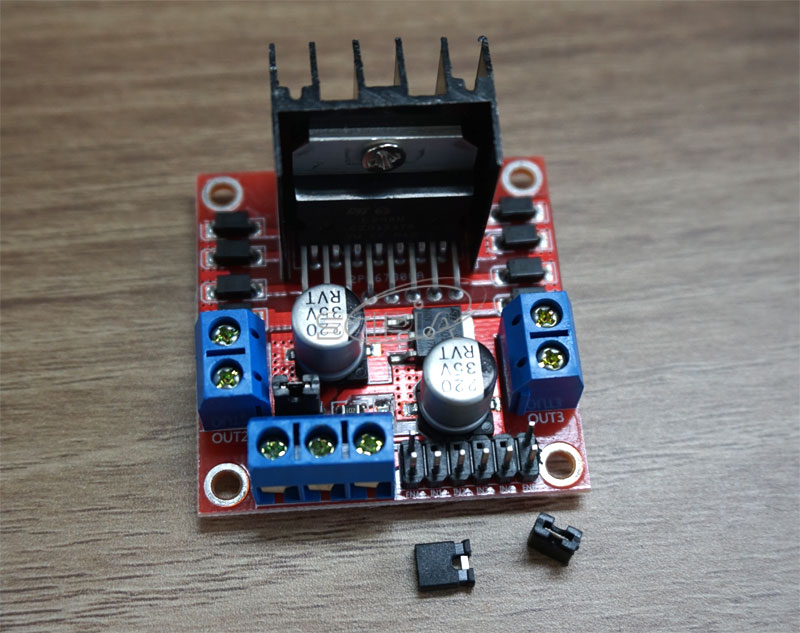
L298N 보드의 ENA, ENB에 있는 점퍼핀을 빼내면 결선할수 있는 핀이 나옵니다.
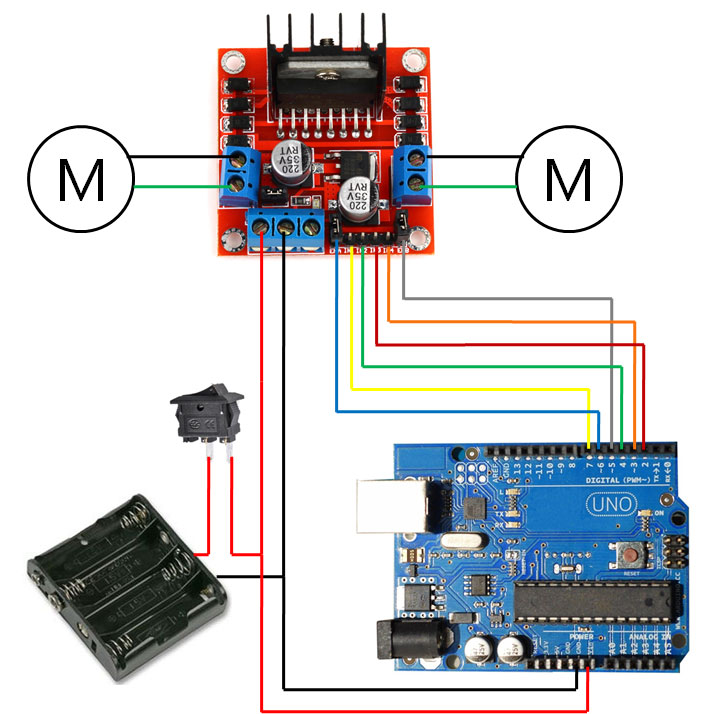
L298N 모터드라이브와 아두이노 우노보드, 파워 결선법은 아래와 같습니다. 파워는 4개의 AA건전지를 사용하며 스위치로 파워를 ON/OFF할 수 있도록 하였습니다. 아두이노 우노보드로의 전원 공급은 반드시 Vin핀과 GND핀으로 하시기 바랍니다.
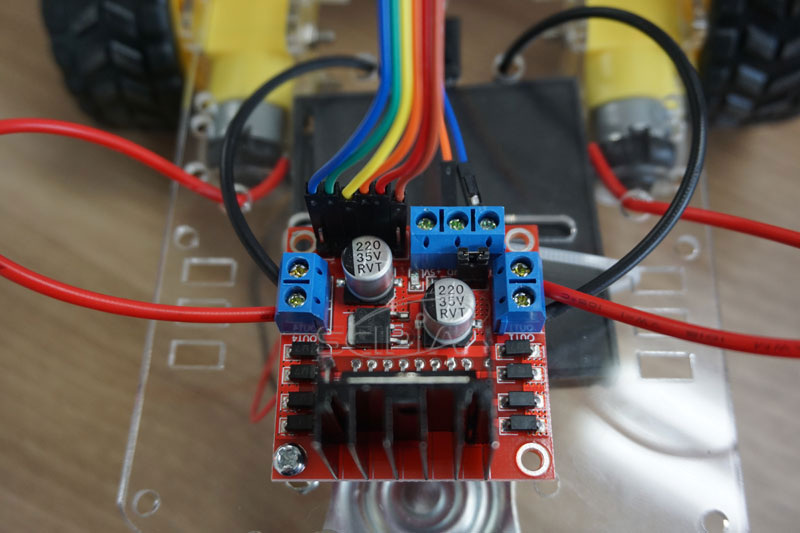
아래는 모터를 결선한 사진입니다.
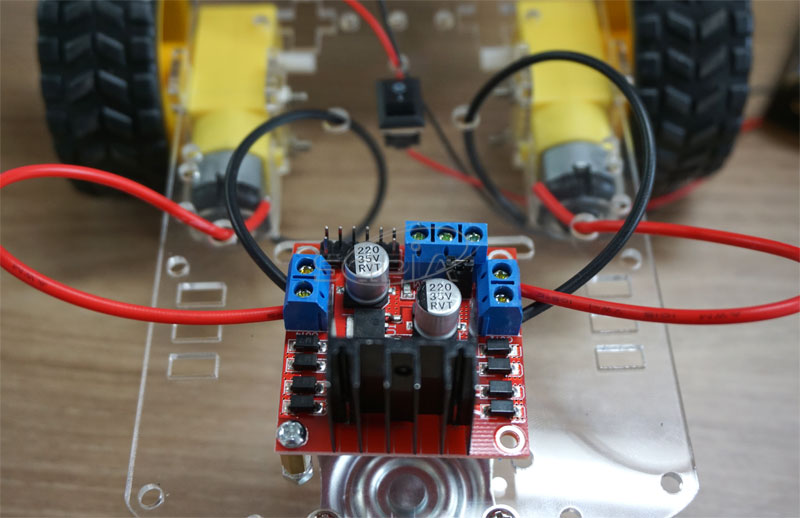
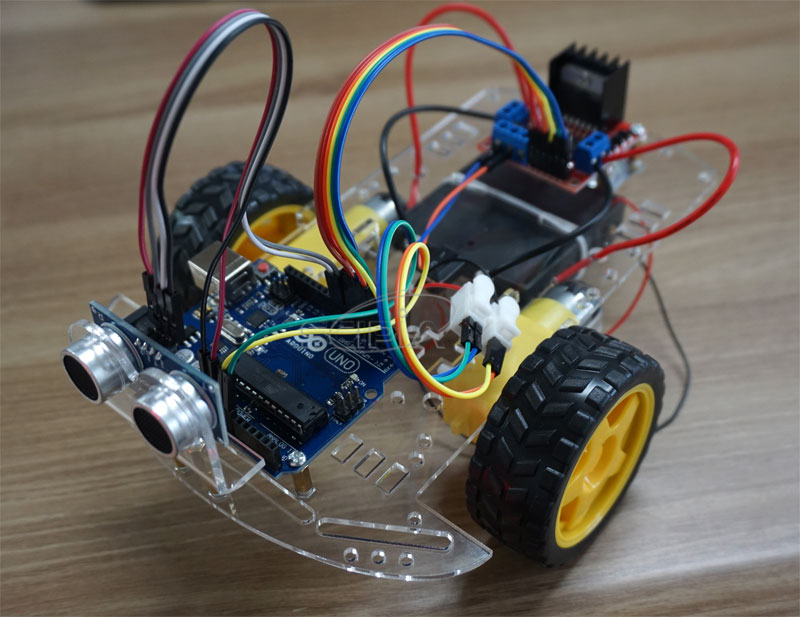
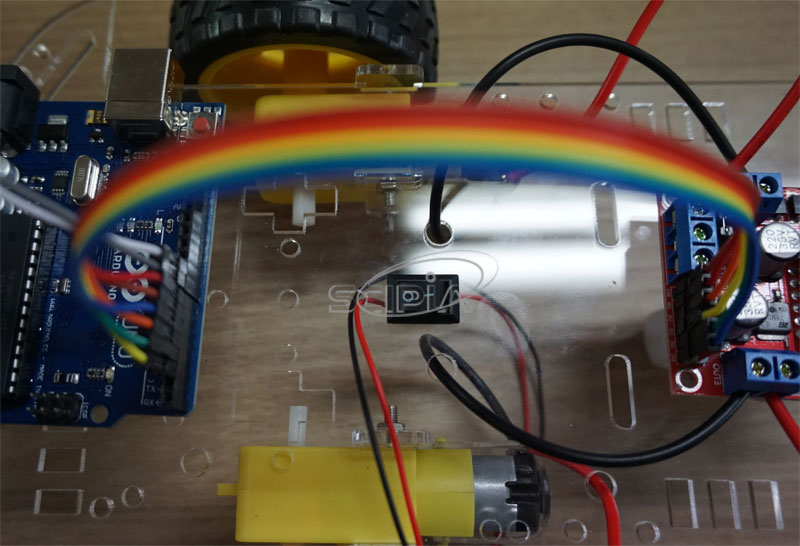
아래는 L298N 보드와 아두이노 보드, 모터와 결선을 완료한 사진입니다.
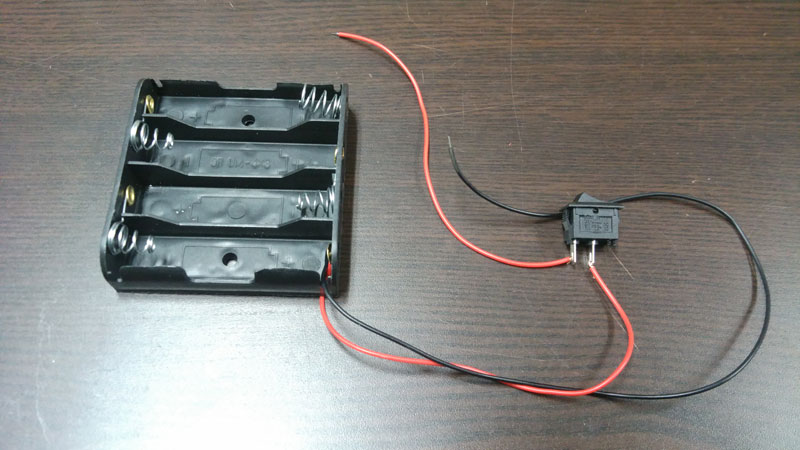
파워를 ON/OFF하기 위한 건전지박스에 스위치를 결선한 사진입니다.
건전지박스의 빨간색(+)선을 잘라 스위치에 각각 결선합니다.
건전지박스는 아래와 같이 케이블 타이를 이용하거나 글루건 또는 양면테이프를 사용하여 고정시키십시요.
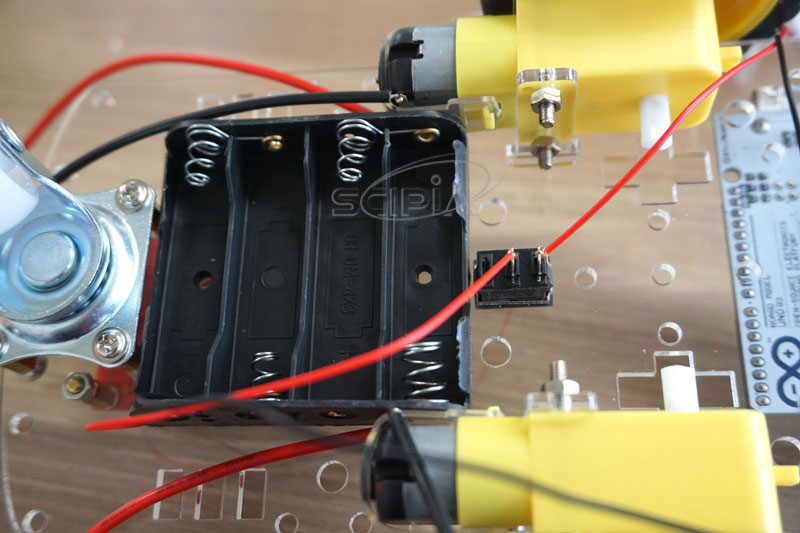
퀵커넥터를 이용하여 모터전원 공급과 아두이노 우노보드 전원 공급을 분기하도록 하였습니다.

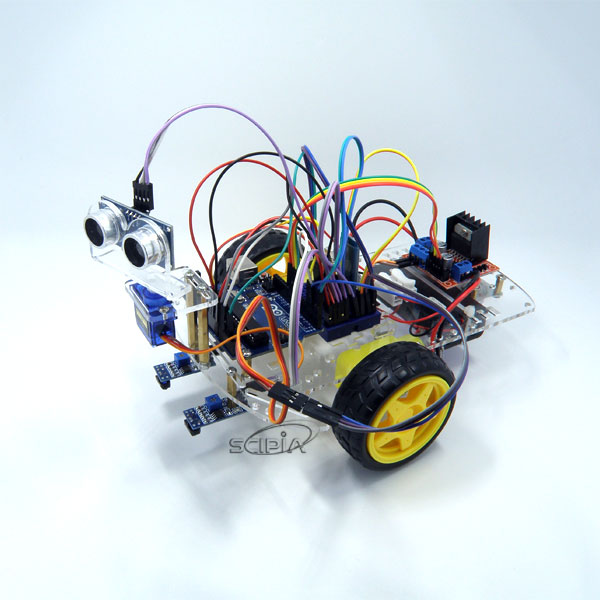
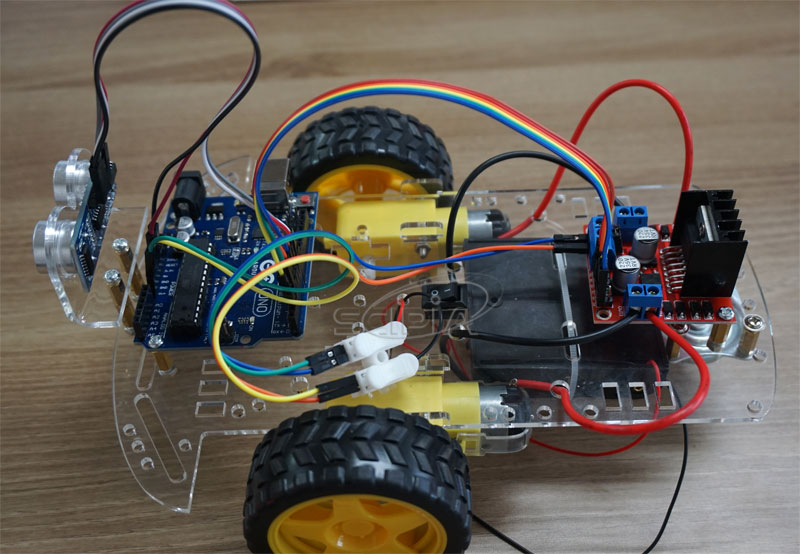
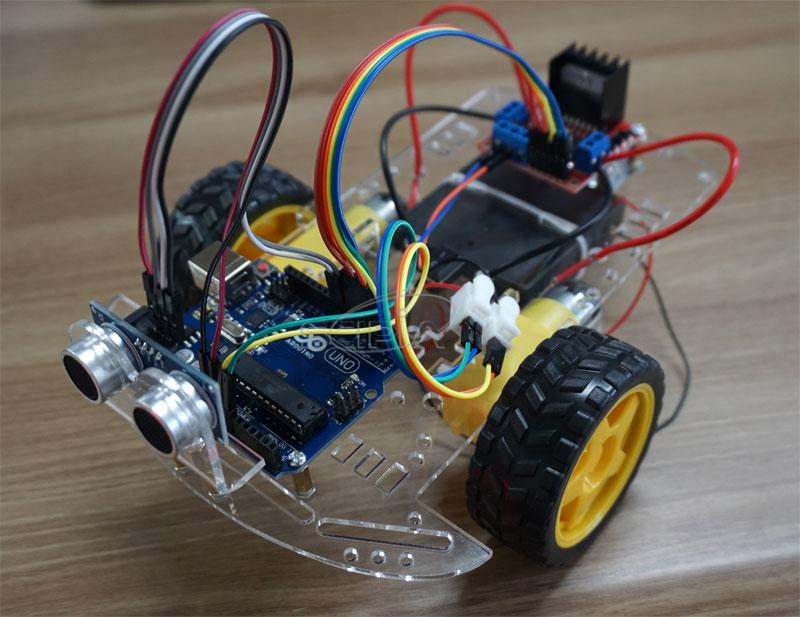
아래는 전체 조립이 완료된 사진입니다.

Author

scipia
싸이피아