SPAC2 고급형 아두이노 2WD 자동차 스마트카 로봇 조립하기
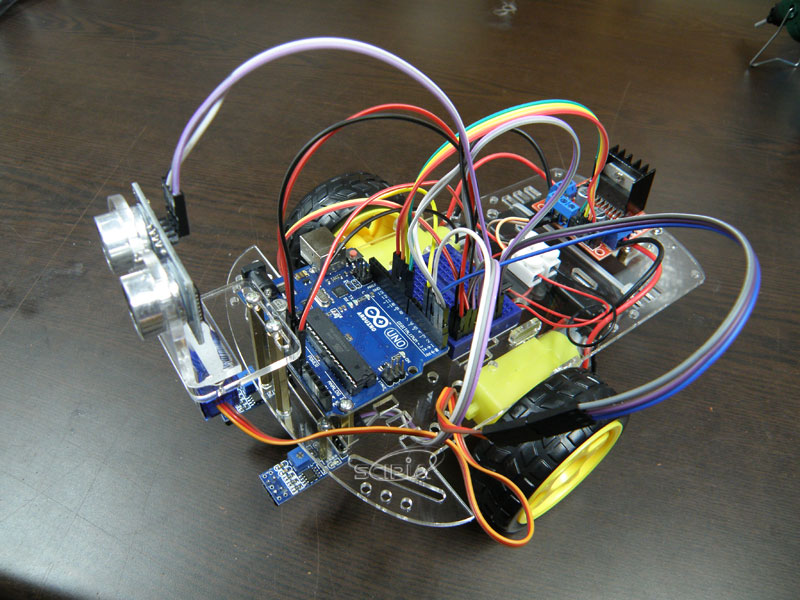
아두이노 우노를 이용한 2WD 자동차 스마트카 로봇 SPAC2입니다. SPAC1의 상위모델로 충전용 18650배터리 2개(7.4V)를 사용하여 강력한 구동이 가능하고 오랜 주행이 가능합니다. 초음파센서에 서보패닝 브라켓을 부착하여 효율적인 장애물 회피가 가능합니다. 추가로 라인트레이서 실험, IR 무선리모컨을 사용한 주행 및 블루투스모듈과 안드로이드 어플을 이용한 무선 주행도 가능합니다.

1. 전체 구성품
SPAC2 아두이노 자동차 튜토리얼에서 사용하는 키트의 전체 구성품은 아래 사진과 같습니다. 구매하신 SPAC2 키트에 포함되지 않은 구성품은 별도로 구매하시면 됩니다.
필요에 따라 추가 스크류 드라이버와 글루건, 양면테이프를 사용하시면 조립에 도움에 될 수 있습니다.


2. 차체 조립 및 결선
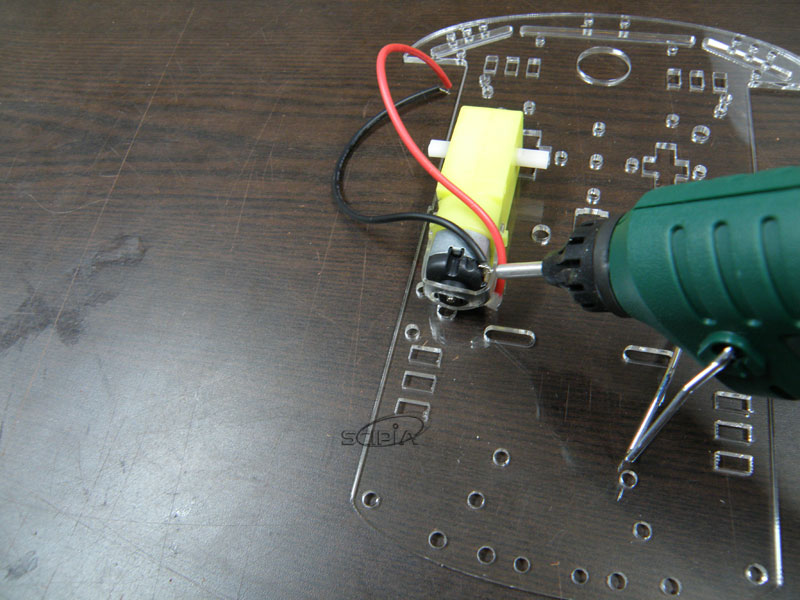
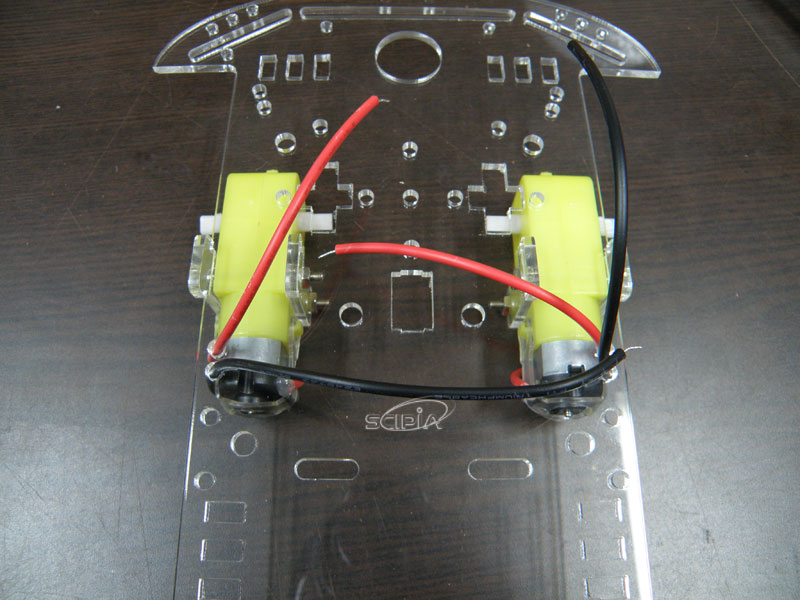
- 구동 모터박스 조립
기어드모터에 전선을 연결한 후 납땜, 글루건 등으로 고정합니다.
기어드모터 고정 브라켓(각 축당 2개)을 사용하여 볼트와 너트로 고정합니다.
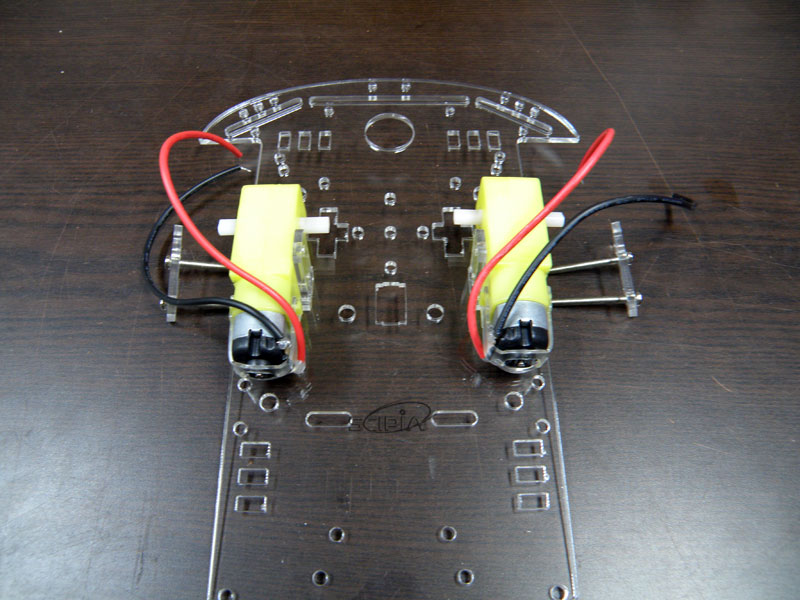
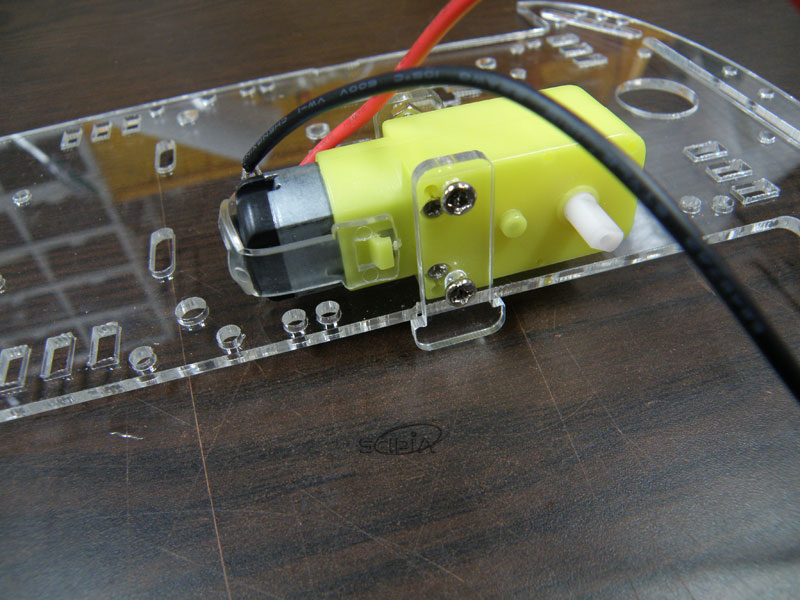
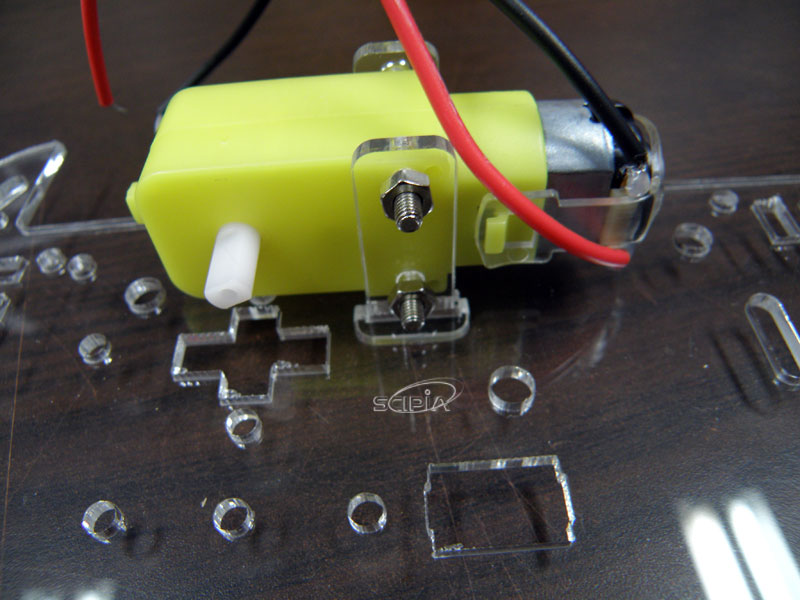
기어드모터에 연결된 전선을 프레임의 홀을 통해서 위쪽으로 빼냅니다.
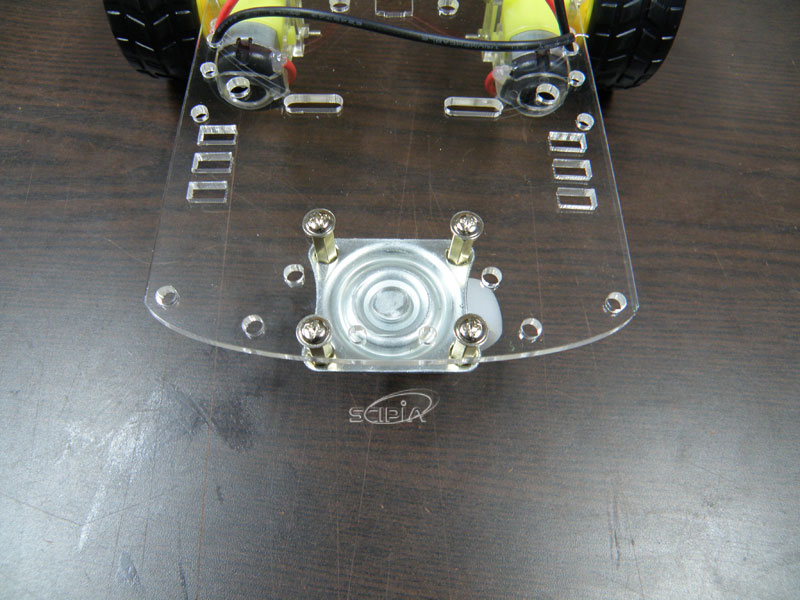
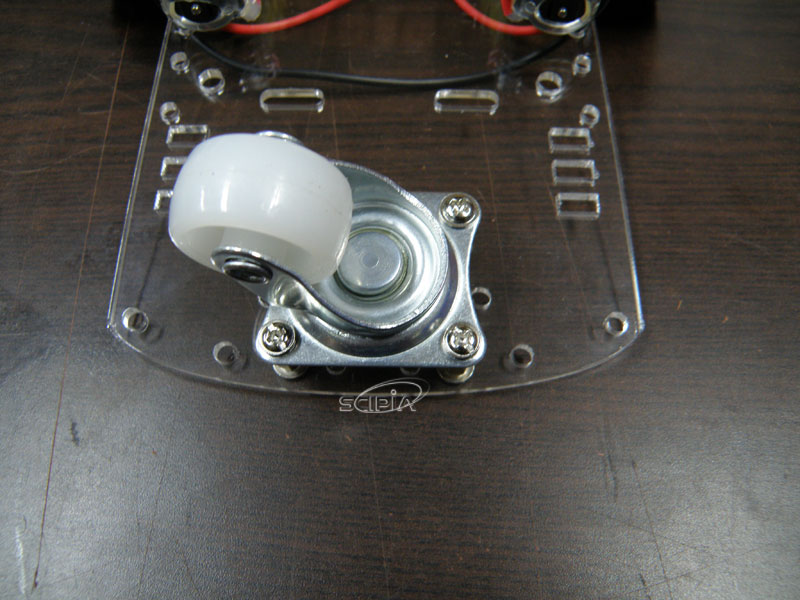
- 볼케스터 조립
볼케스터를 써포터 4개와 볼트를 사용하여 고정합니다.
- 메인 전원 연결
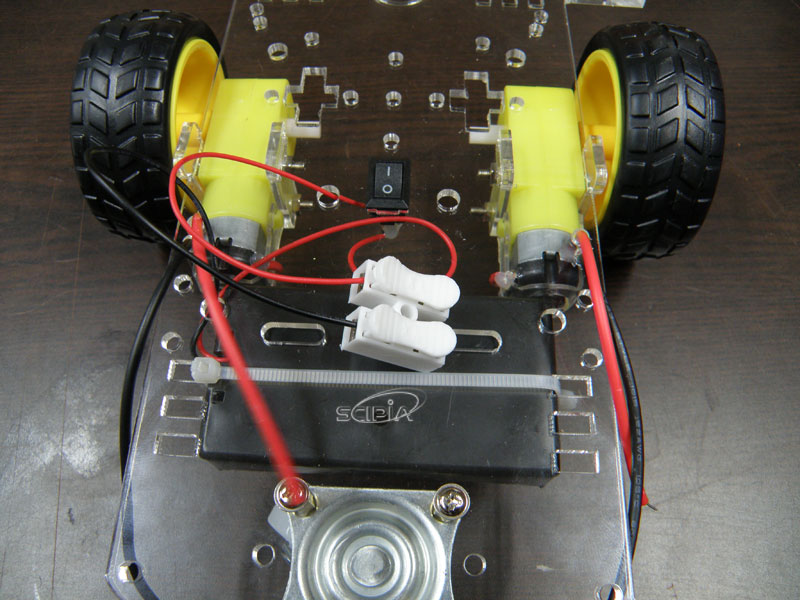
18650 배터리홀터를 케이블타이 2개를 사용하여 프레임 아래에 고정시킨 후 검정선은 프레임 위쪽으로 빼고 빨간선은 스위치의 한쪽 단자에 스위치의 다른 단자는 별도의 선을 연결하여 검정선과 마찬가지로 프레임 위쪽으로 빼냅니다.
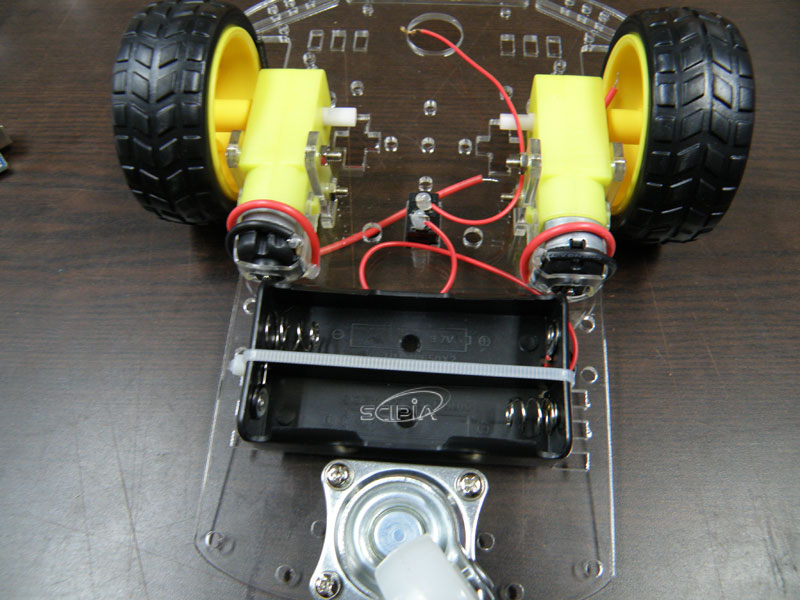
위에서 빼낸 배터리홀더의 검정선과 스위치 단자에서 빼낸 한선을 전선 퀵커넥터에 각각 연결하고 양면테이프나 글루건으로 퀵커넥터를 프레임에 고정시킵니다.
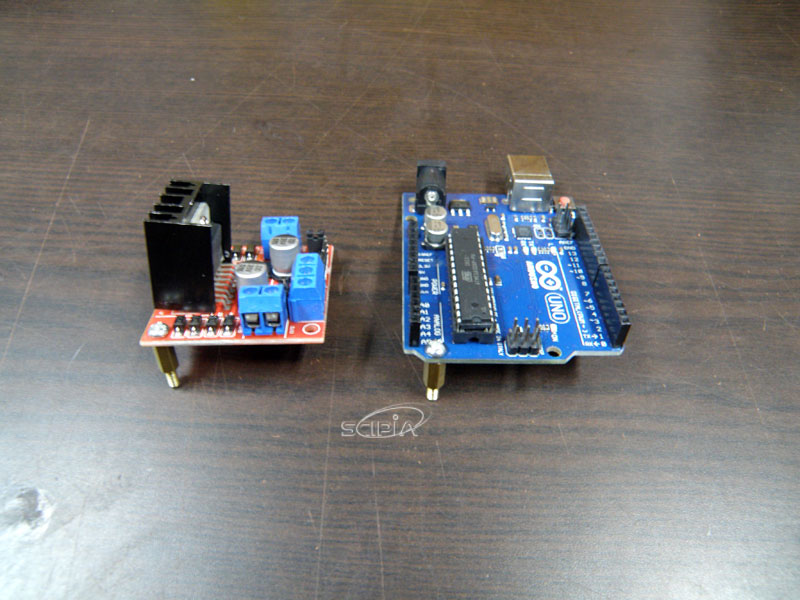
- L298N 및 아두이노 우노 보드 부착 및 결선
아래와 같이 아두이노 보드와 L298N 모터드라이브 모듈의 한쪽 홀에 써포터를 연결합니다.
아래와 같이 L298N 모터드라이브 모듈을 너트로 프레임에 고정합니다.
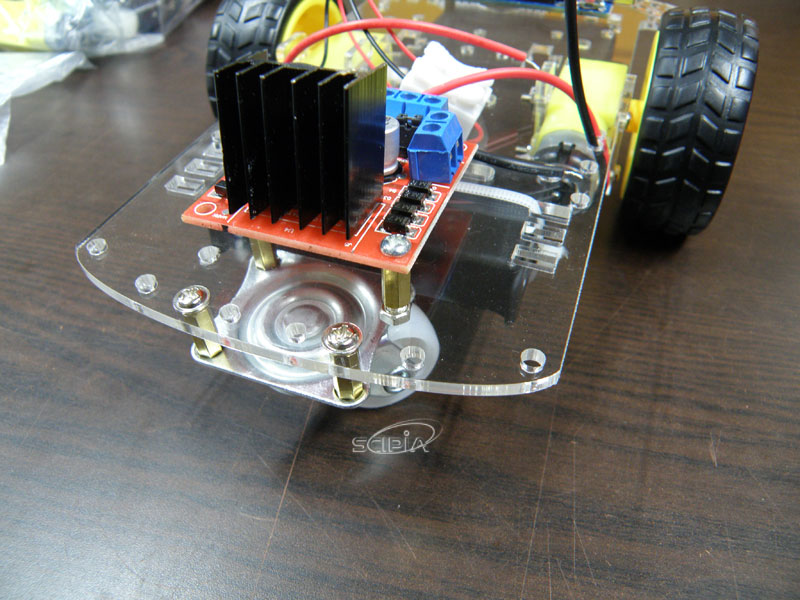
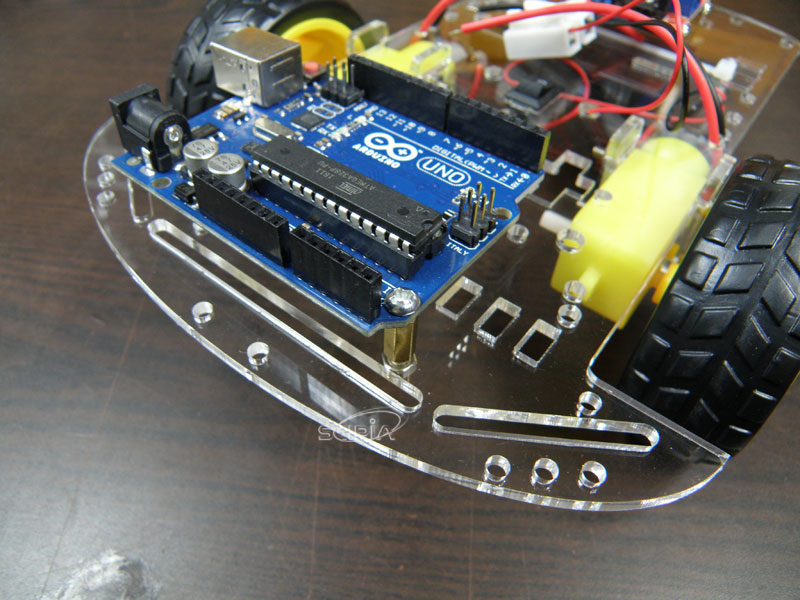
다음으로 아두이노 보드를 같은 방법으로 고정합니다.
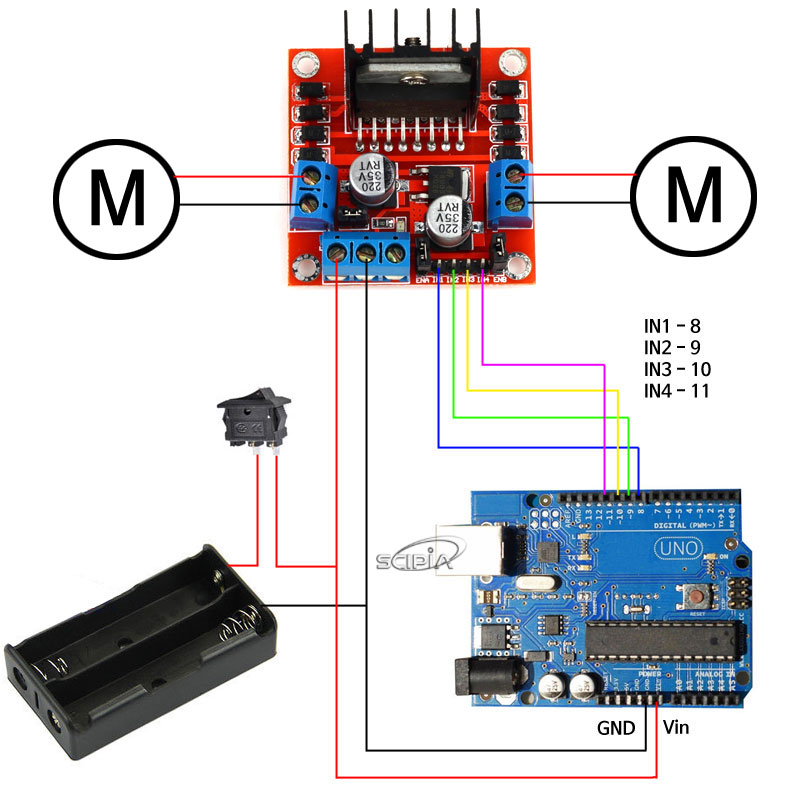
아래는 양 축 모터 구동을 위한 전체 결선도 입니다. 메인 전원(18650 배터리 쪽에서 공급받는 전원)은 퀵커넥터에서 연결하시면 됩니다. 메인 전원은 L298N 모듈 및 아두이노 우노 보드에 모두 공급되어야 합니다.
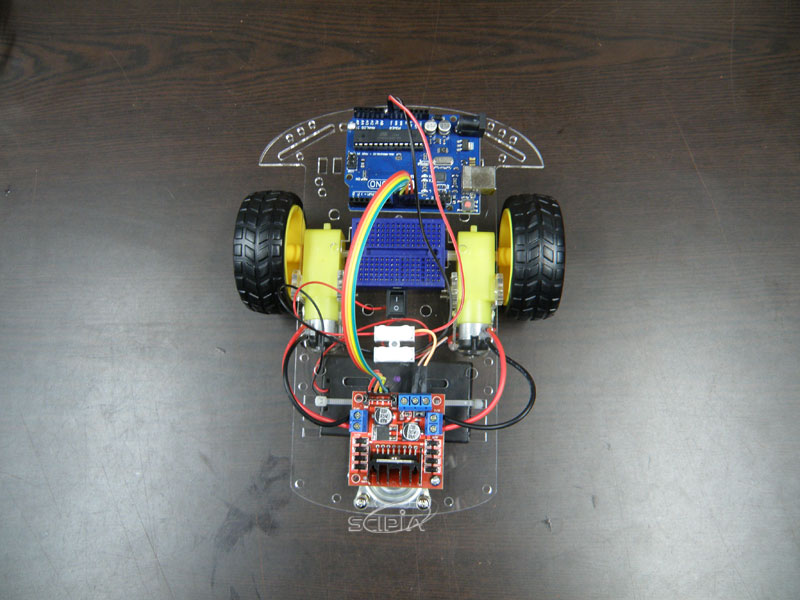
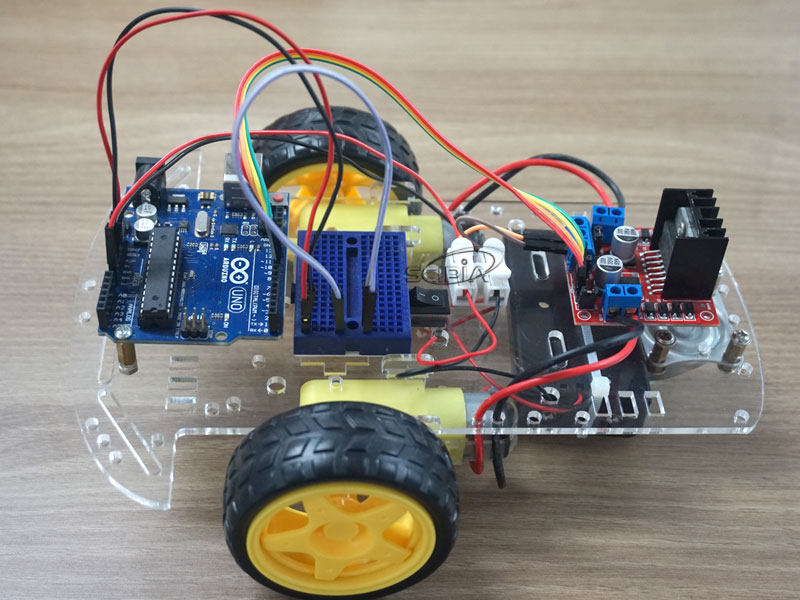
아래는 결선이 마무리된 사진입니다.
- 미니 브레드보드 부착 및 5V 전원 포트 연장
SPAC2에서 사용되는 초음파센서, 서보모터, TCRT5000모듈 2개, IR 리모컨 수신센서, 블루투스모듈(사용할 경우에만)은 각각 별도로 5V와 GND의 전원공급이 필요합니다. 아두이노 보드상에는 5V와 GND핀이 충분하지 않으므로 브레드보드를 사용하여 5V, GND 전원핀을 확장하여 사용하여야 합니다.
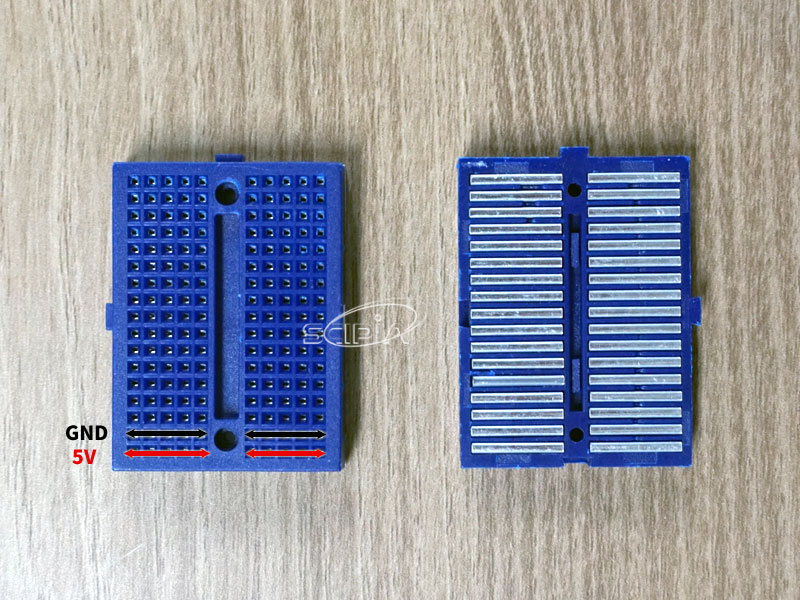
아래는 사용할 브레드보드의 외부와 내부 사진입니다. 우측 사진에서 보면 가로 5핀 단위로 내부적으로 도체로 연결되어 있습니다.
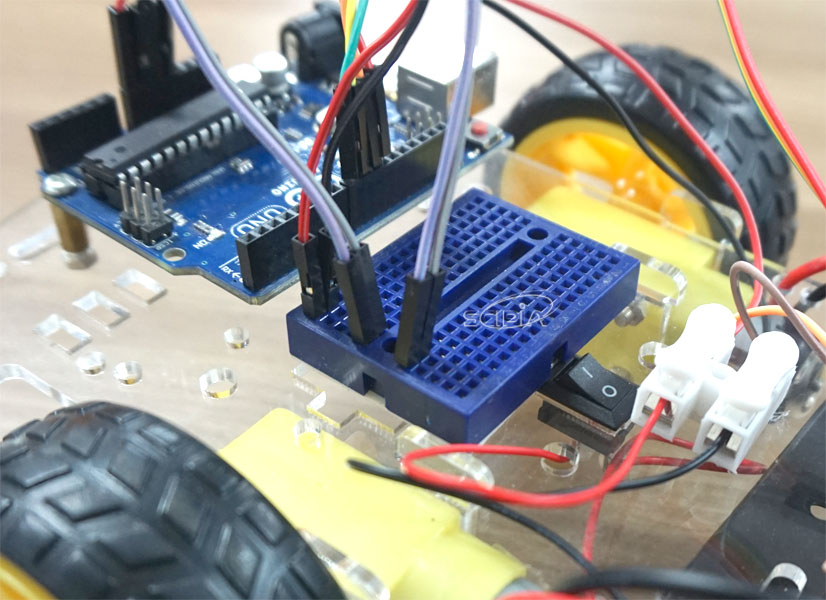
미니 브레드보드를 밑면에 부착된 양면테이프로 프레임에 부착하고 아두이노 우노보드의 5V핀과 GND핀을 브레드보드에 연결합니다.
추가로 가로 10핀씩 2줄이 연결되도록 점퍼선으로 아래 사진과 같이 연결합니다.
아래 사진과 같이 5V 10핀, GND 10핀이 가로로 연결됩니다. 이것으로 5V, GND 전원선을 연장하여 사용하기 위한 충분한 핀이 확보되었습니다.
- 라인트레이서 센서 부착 및 결선
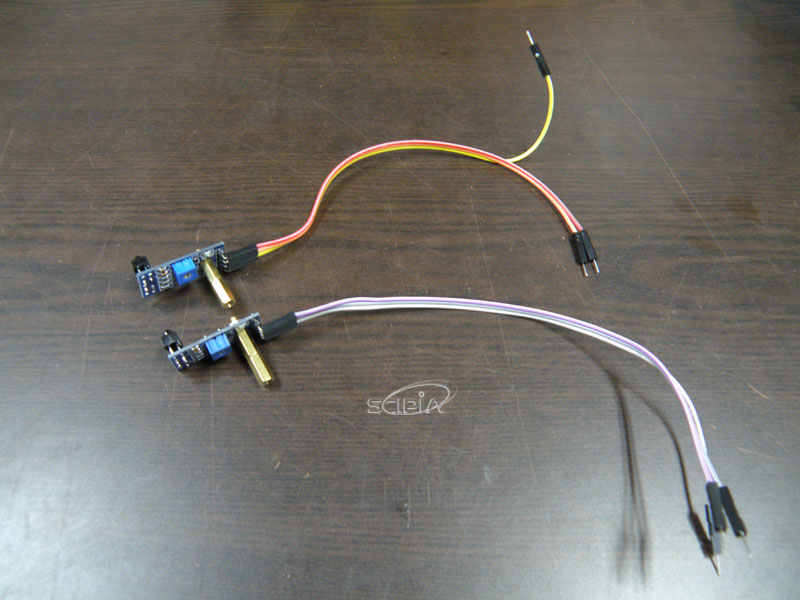
라인트레이서용 TCRT5000모듈을 써포터 2개를 연결한 후 너트로 모듈에 고정합니다. 또한 3P 암수케이블을 연결합니다.
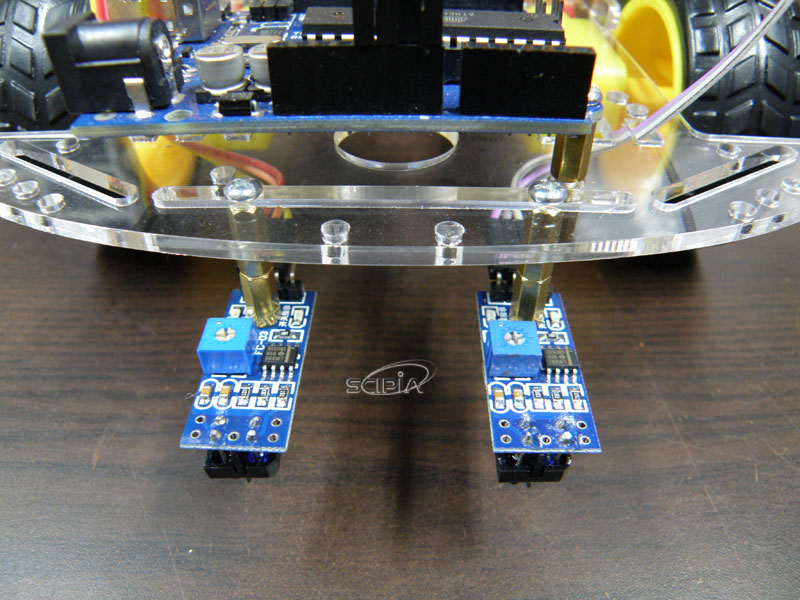
센서모듈은 볼트로 프레임에 아래와 같이 부착합니다.
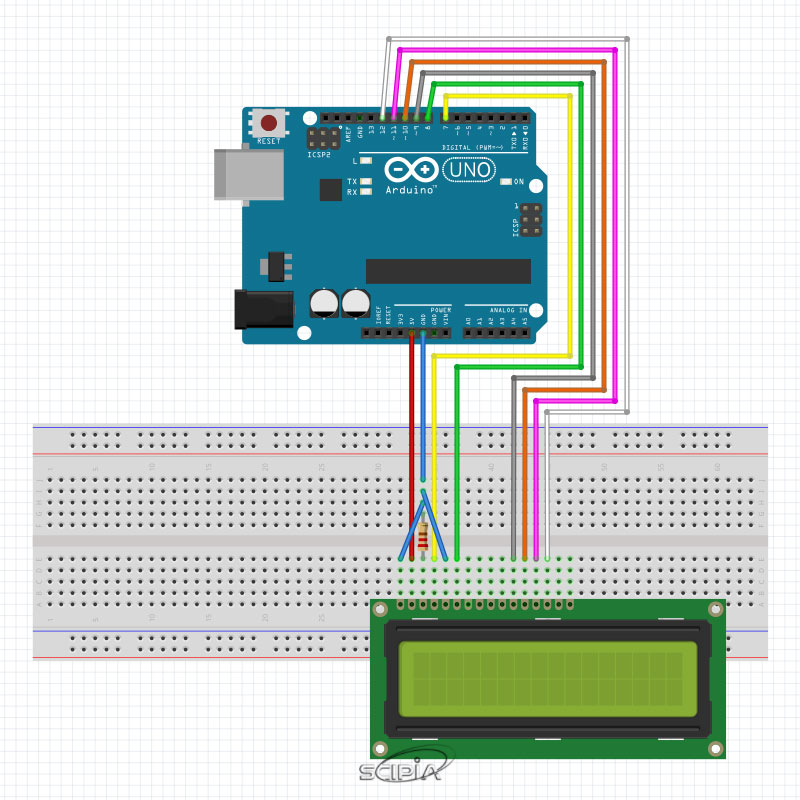
센서와 아두이노 보드의 결선은 아래와 같이 합니다. 5V, GND 결선은 위에서 확장한 브레드보드에 연결하시면 됩니다.
1. 우측센서 결선
VCC - 5V
GND - GND
D0 - 3번
2. 좌측센서 결선
VCC - 5V
GND - GND
D0 - 4번

- 초음파센서 서보패닝브라켓 부착 및 결선
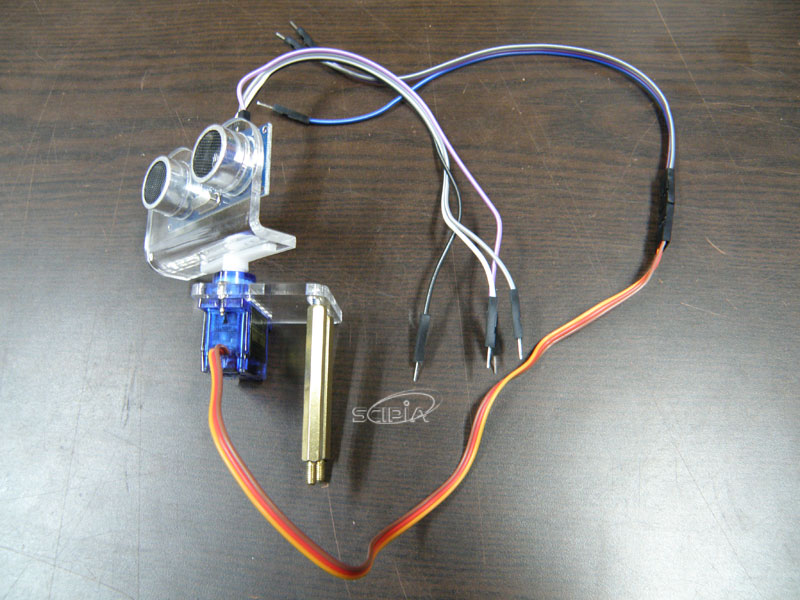
초음파센서와 서보패닝 브라켓을 조립한 후 초음파센서에는 4P암수커넥터로 결선하고, 서모모터에는 3P 수수커넥터로 케이블을 연장합니다.
초음파센서 서보패닝브라켓을 프레임에 부착합니다. 아두이노 우노보드와의 결선은 아래와 같이 하시고 5V, GND 전원은 브레드보드에 하시면 됩니다.
1. 초음파센서 결선
VCC - 5V
TRIG - A0
ECHO - A1
GND - GND
2. 서보모터 결선(갈색선: GND, 빨간선: VCC, 오렌지선: SIGNAL)
VCC - 5V
GND - GND
SIGNAL - 2번
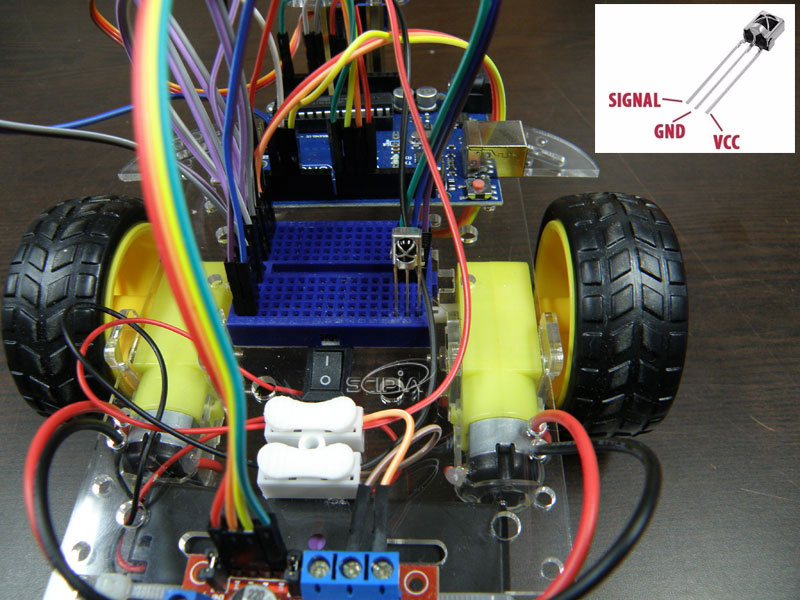
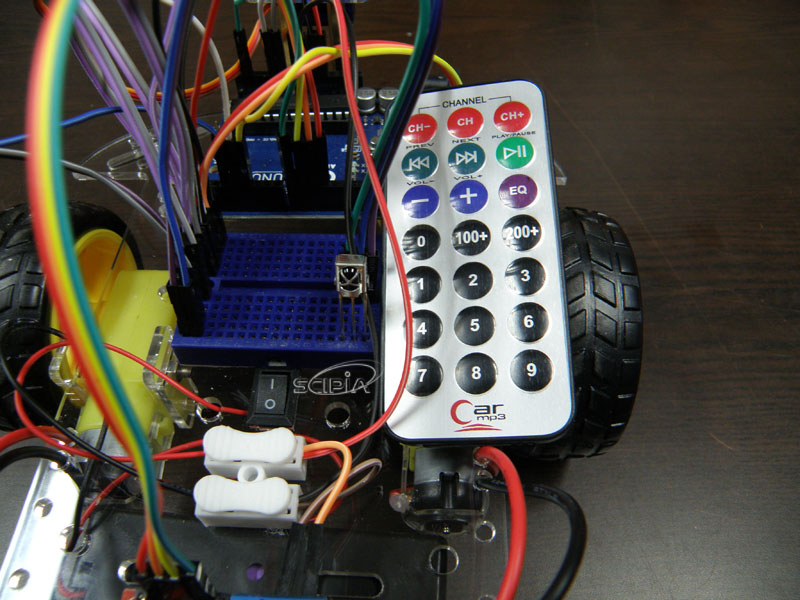
- IR리모컨 적외선 수신센서 부착 및 결선
IR리모컨 적외선 수신센서를 브레드보드에 꼽고 아두이노 보드와 결선합니다. 5V, GND 전원은 브레드보드에 하시면 됩니다.
- IR 수신센서 결선
VCC - 5V
GND - GND
SIGNAL - A4
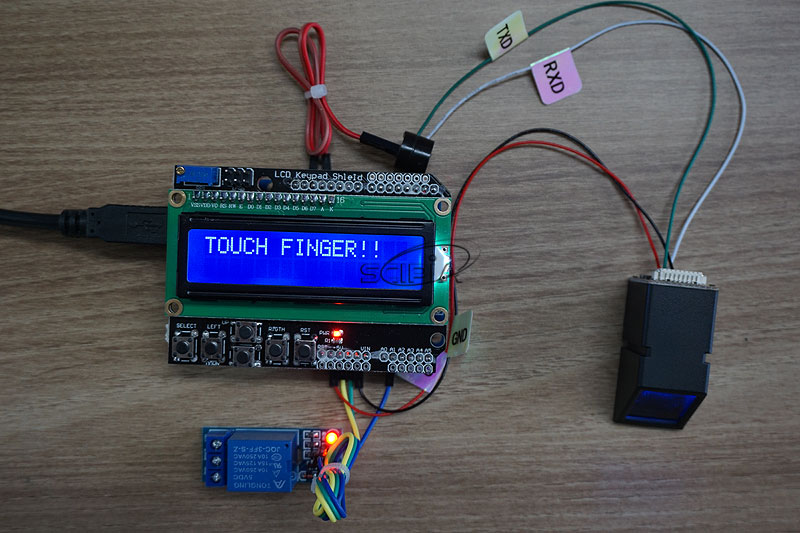
- 블루투스 수신모듈 부착 및 결선
블루투스 모듈을 브레드보드에 꼽고 아두이노 보드와 결선합니다. 5V, GND 전원은 브레드보드에 하시면 됩니다.
- 블루투스 모듈 결선
VCC - 5V
GND - GND
TXD - RXD
RXD - TXD
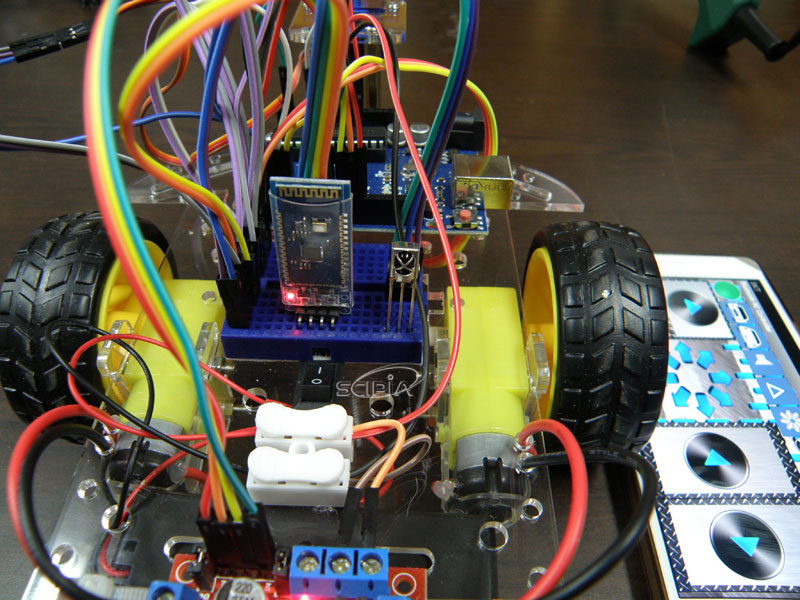
구글 안드로이드 마켓에서 Arduino Bluetooth RC Car를 검색하여 설치합니다.

아래는 라인트레이서 주행 실험 사진입니다.

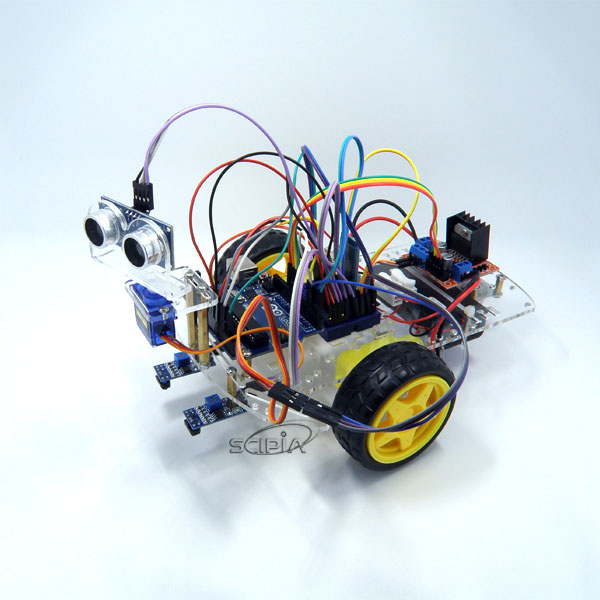
아래는 초음파 서보패닝 장애물 회피 주행 실험 사진입니다.

Author

scipia
싸이피아