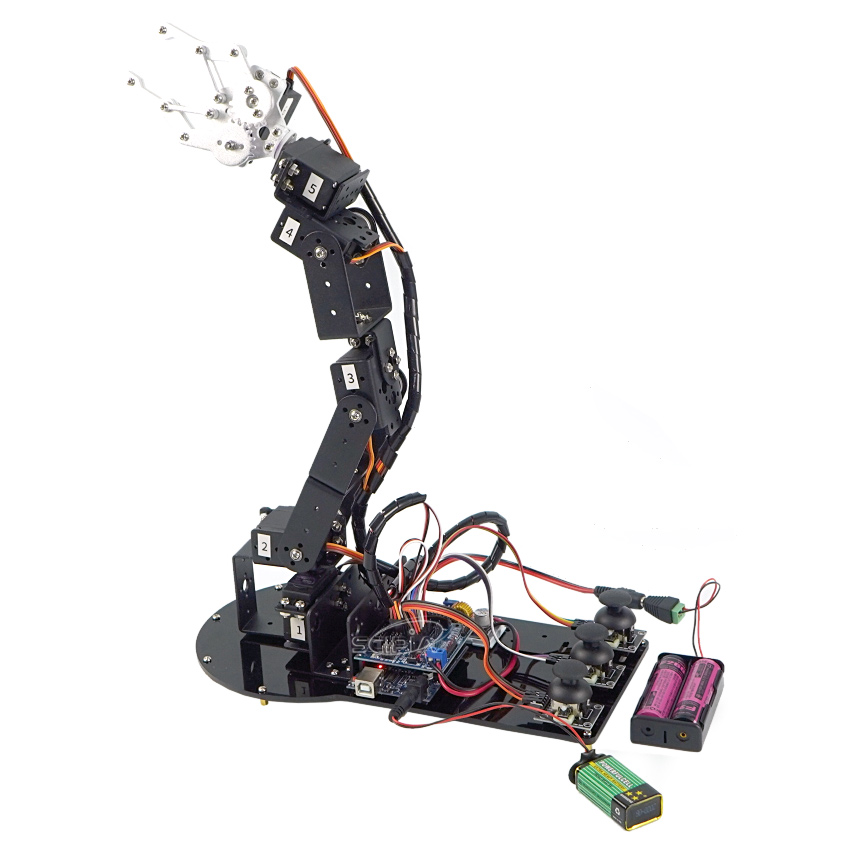
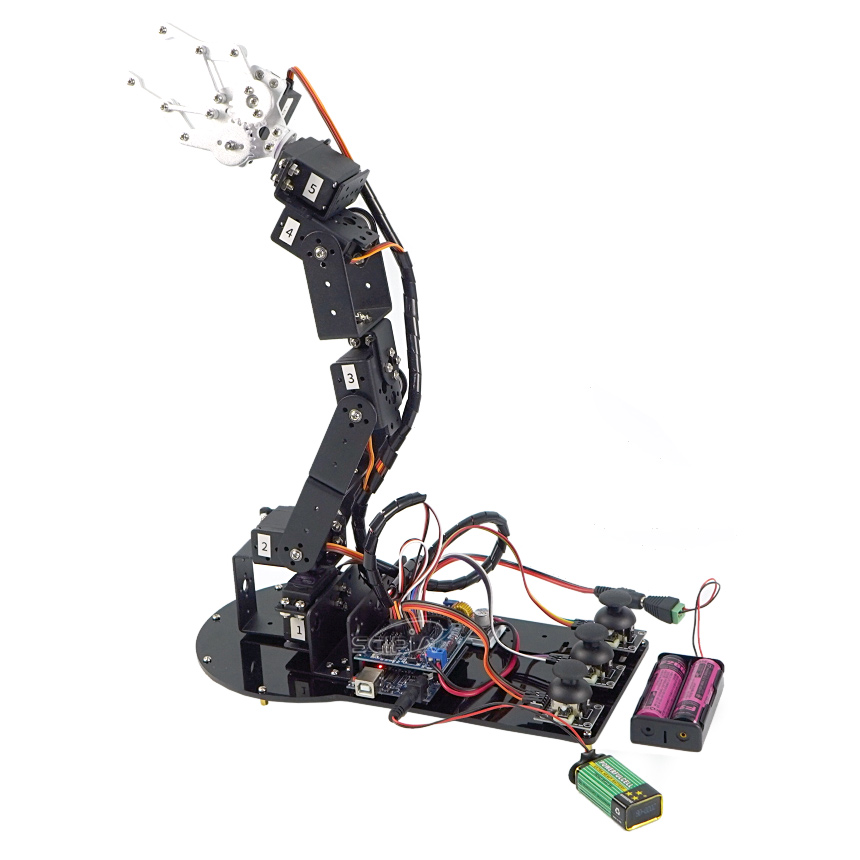
6자유도 알루미늄 로봇팔 로봇암 구동부 조립방법
조립이 완료된 6자유도 알루미늄 로봇팔을 구동하기 위한 구동부의 조립방법에 대해서 설명합니다. 로봇팔에 구동부를 결합한 후 아두이노에 프로그램을 업로드하게 되면 3개의 조이스틱 스위치를 사용하여 총 6개의 서보모터를 각각 제어할 수 있게 됩니다.

아두이노 구동소스
압축 암호는 구동부품세트에 포함되어 있습니다.
- scipia_robotarm_6dof.zip
2020년 5월 9일 이후 구매자는 아래를 다운받으시기 바랍니다.
- 동영상
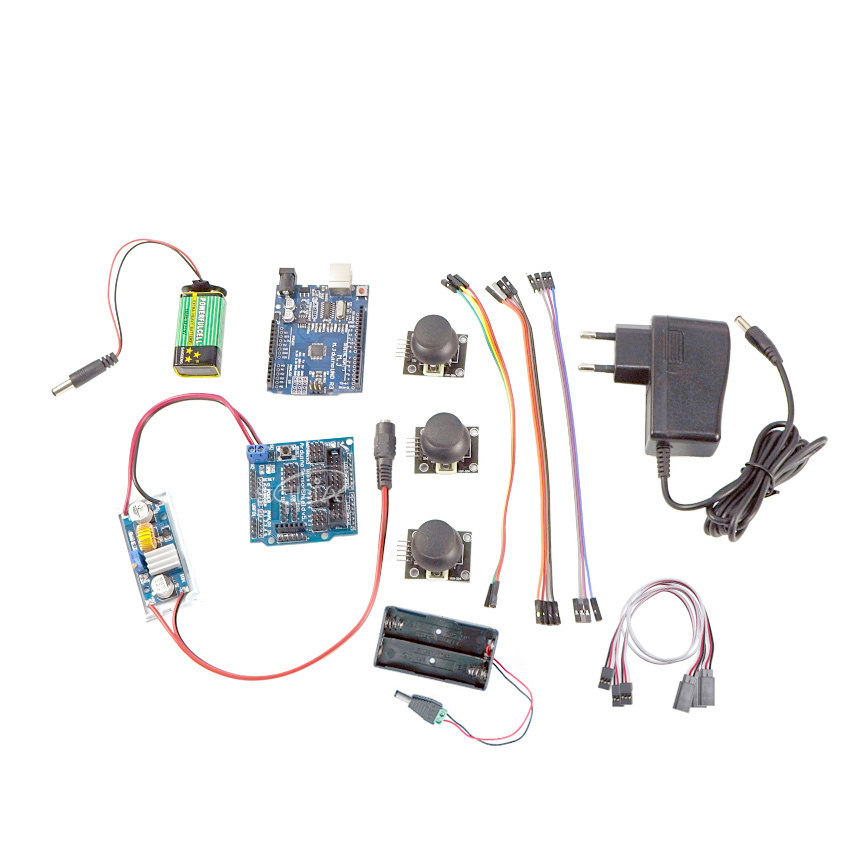
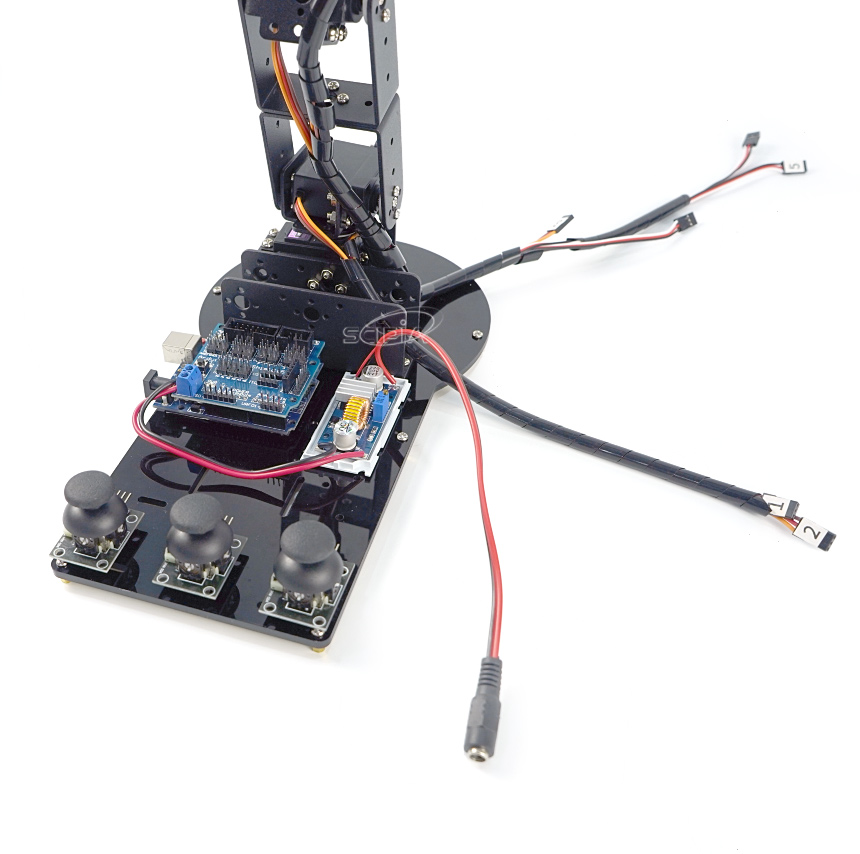
다음은 구동부의 구성품입니다.
아두이노보드, 서보모터 확장보드, DC전원컨버터, 조이스틱3개, 점퍼선, 전원아답터(또는 리튬이온 충전배터리), 9V 전지(아두이노보드 공급전원), 연장케이블 등으로 구성되어 있습니다.
먼저 로봇팔의 6개의 서보모터 위 또는 모터 부근에 번호 스티커를 붙입니다. 하단의 서보모터부터 순차적으로 총 6개를 부착합니다.
상단부의 4번, 5번, 6번 서보모터의 케이블은 구동부에 연결이 가능하도록 연장케이블을 연결합니다.
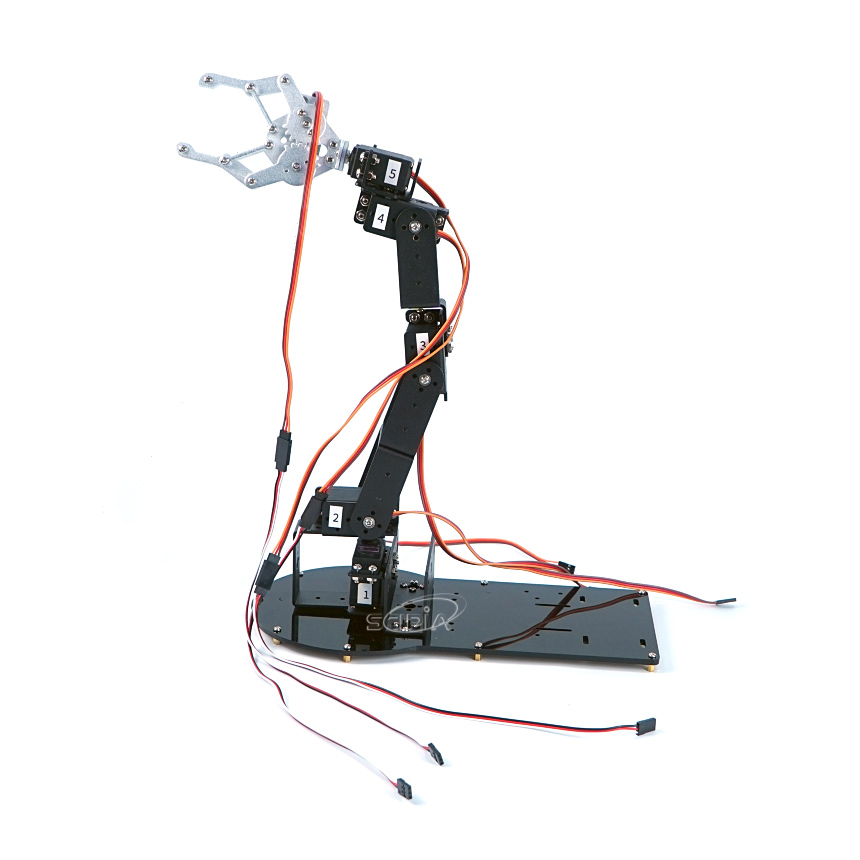
케이블의 커넥터에도 각각 서보모터에 해당하는 번호 스티커를 부착합니다.
전선정리용 튜브를 사용하여 서보모터 케이블을 감싸줍니다. 이 때 각각의 구동부의 동선을 고려하여 꼬이거나 너무 짧지않도록 합니다.


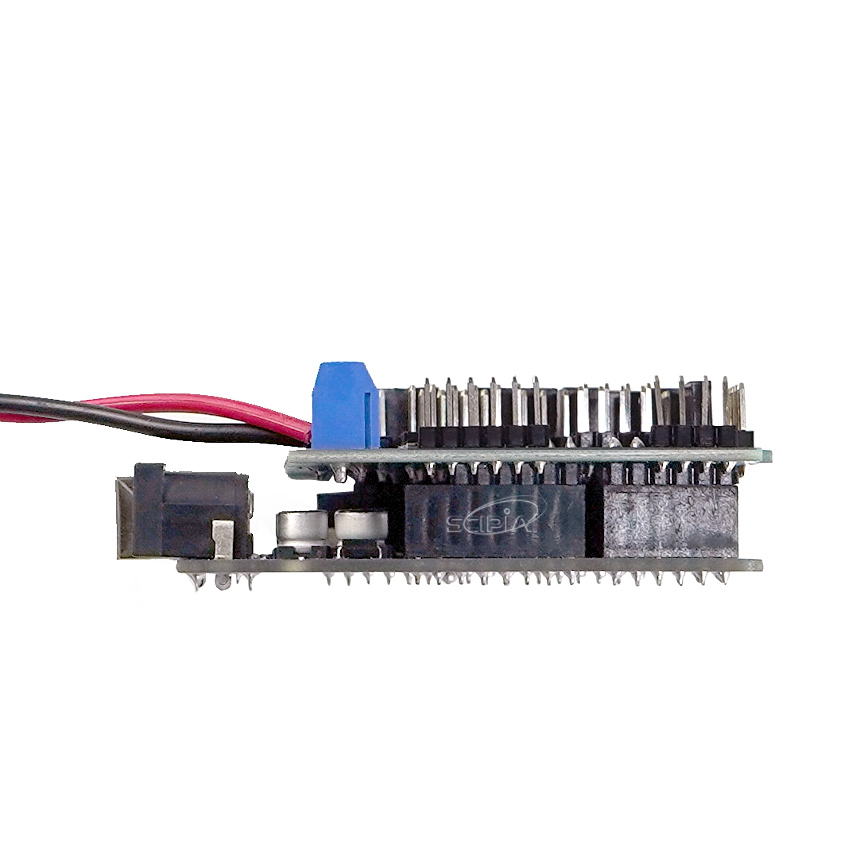
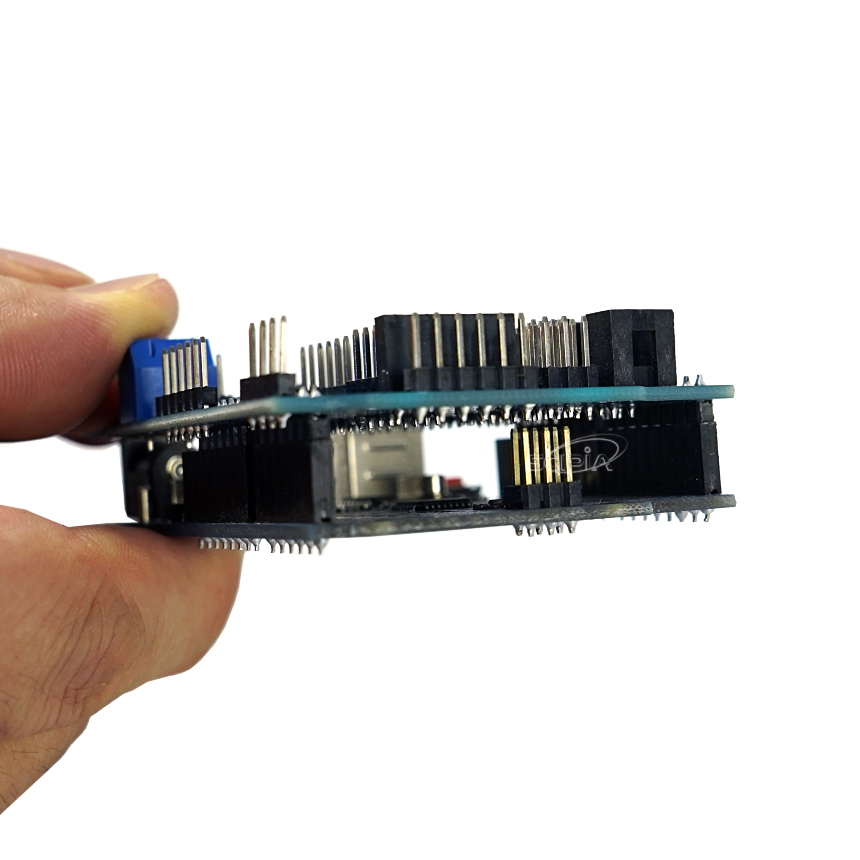
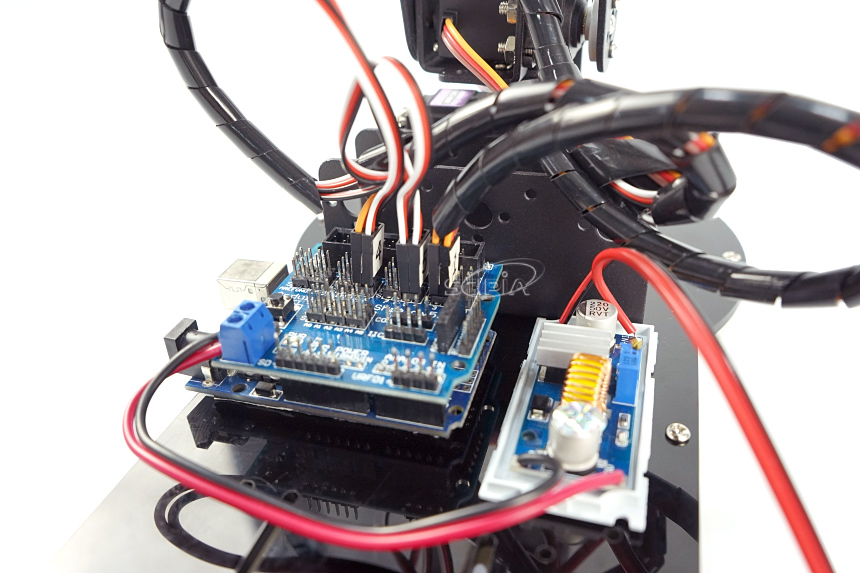
아래 사진과 같이 아두이노보드위에 서보모터확장보드를 결합합니다. 결합시에는 확장보드의 핀과 아두이노 보드의 핀이 잘 매치가 되도록 해야 합니다.
다음은 조이스틱3개, 아두이노 보드(확장보드포함), DC컨버터를 폼양면테이프를 이용해서 아래와 같이 로봇팔 베이스판에 고정시킵니다.
* 이 때 폼양면테이프가 매우 강력하니, 부착하기 전에 정확한 위치를 먼저 잡아주고 부착시켜 고정시켜줍니다.
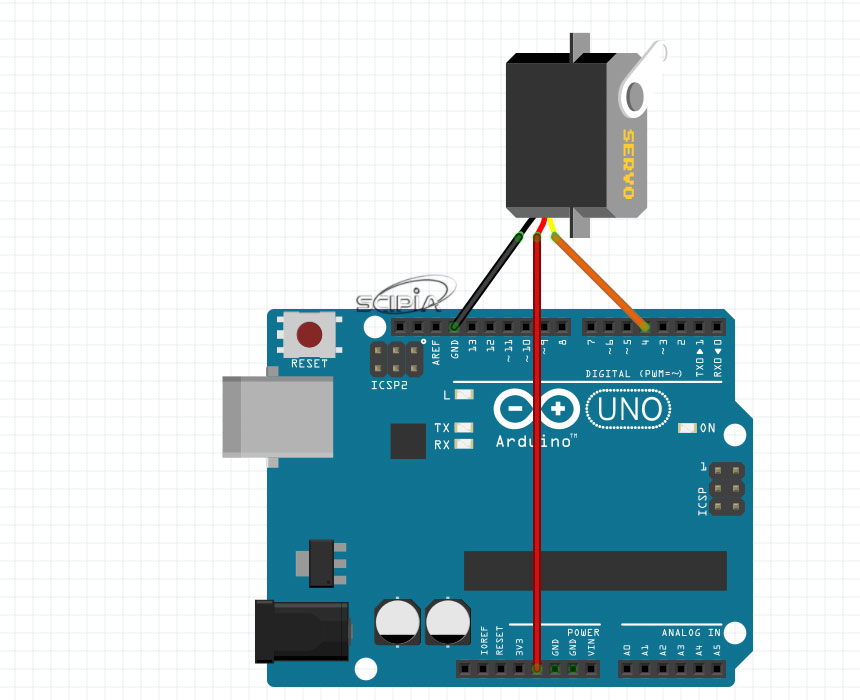
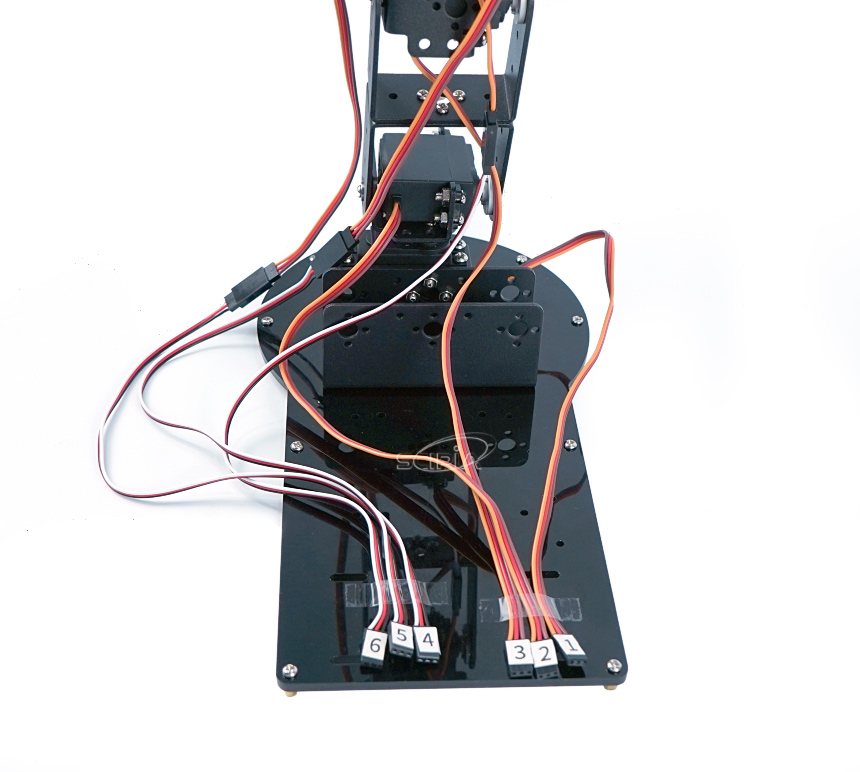
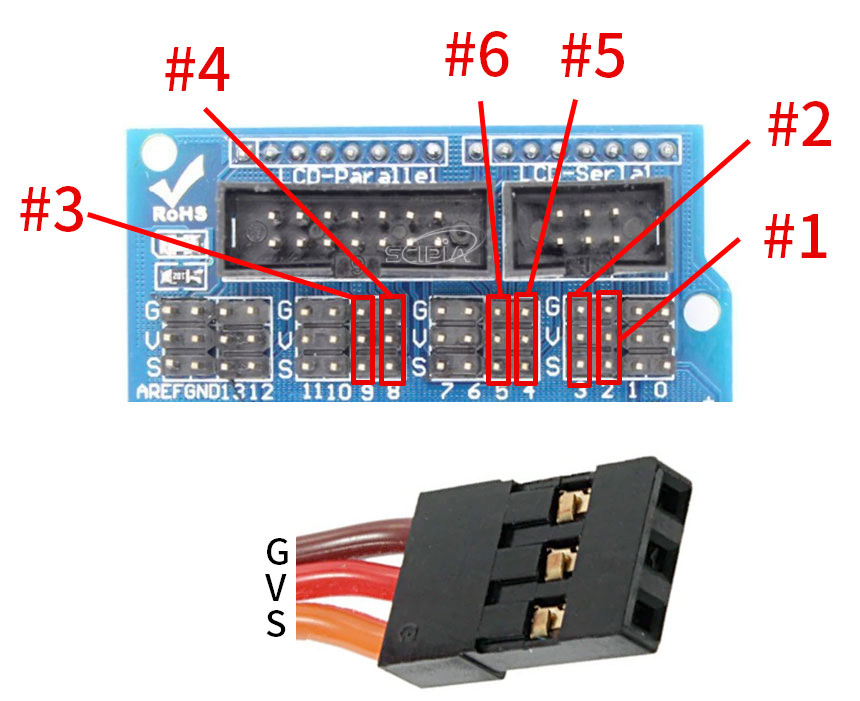
각각의 서보모터케이블을 각각 1번(서보모터 번호)→2번(아두이노 디지털 IO) , 2번→3번, 3번→9번, 4번→8번, 5번→4번, 6번→5번으로 연결합니다.
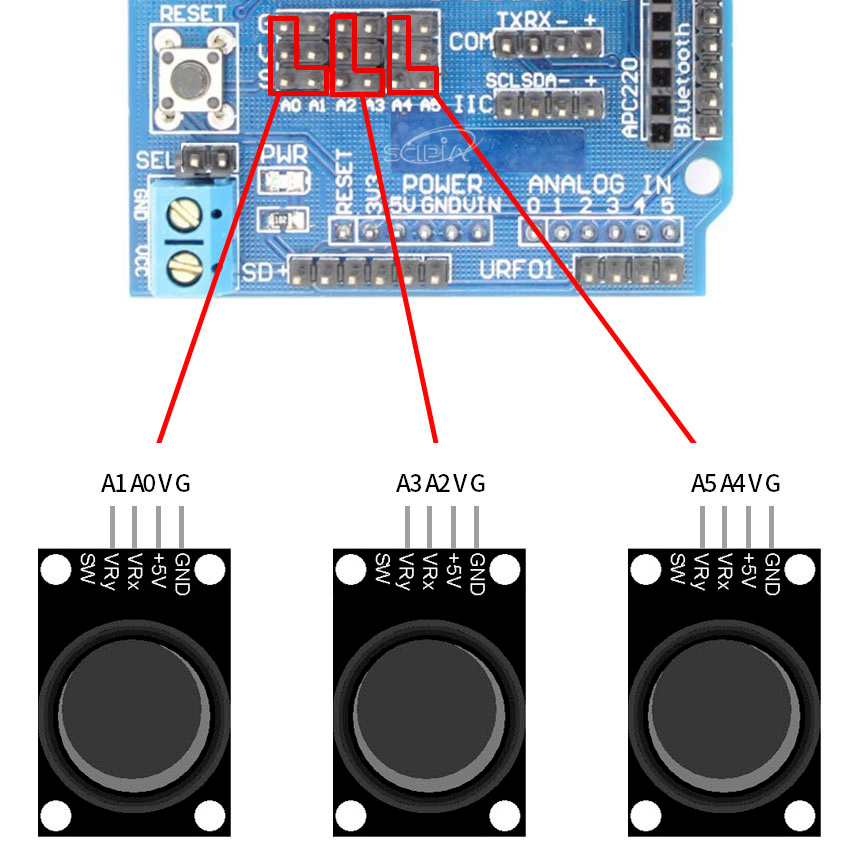
3개의 조이스틱 스위치를 점퍼선을 사용하여 확장보드 A0~A5에 연결합니다.
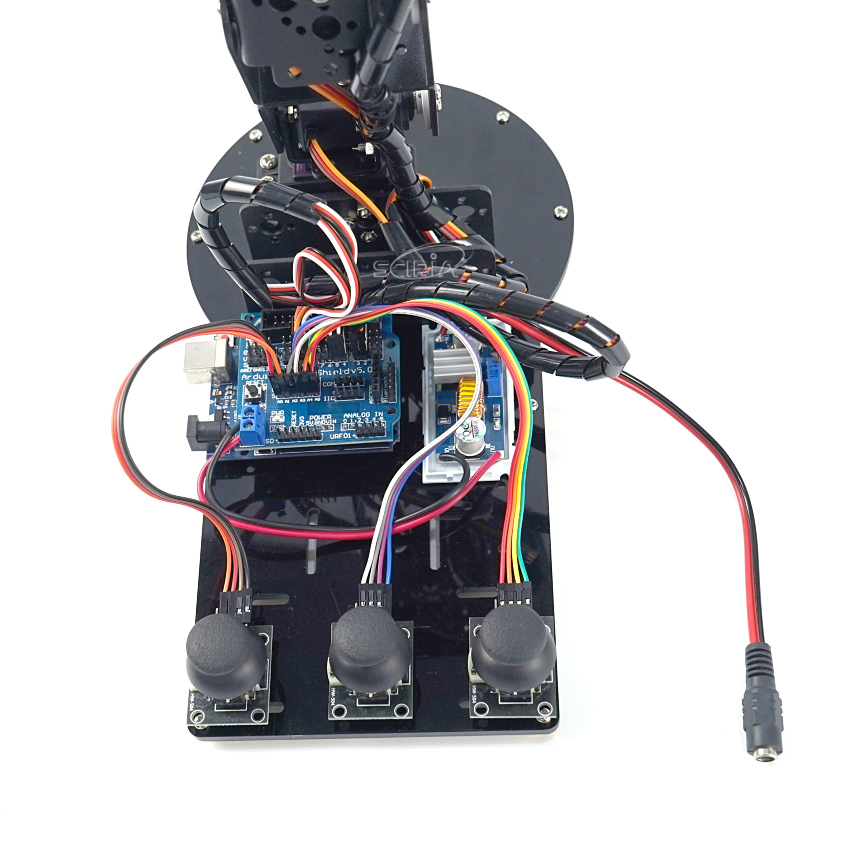
마지막으로 아두이노 보드에 구동전원(9V배터리 또는 USB전원)을 연결하고 로봇 구동용 전원(12V 아답터 또는 리튬이온 충전배터리)을 공급해주면 6자유도를 구동시키기 위한 컨트롤러 연결 과정이 완료됩니다.
Author

scipia
싸이피아