푸시버튼 스위치 실험
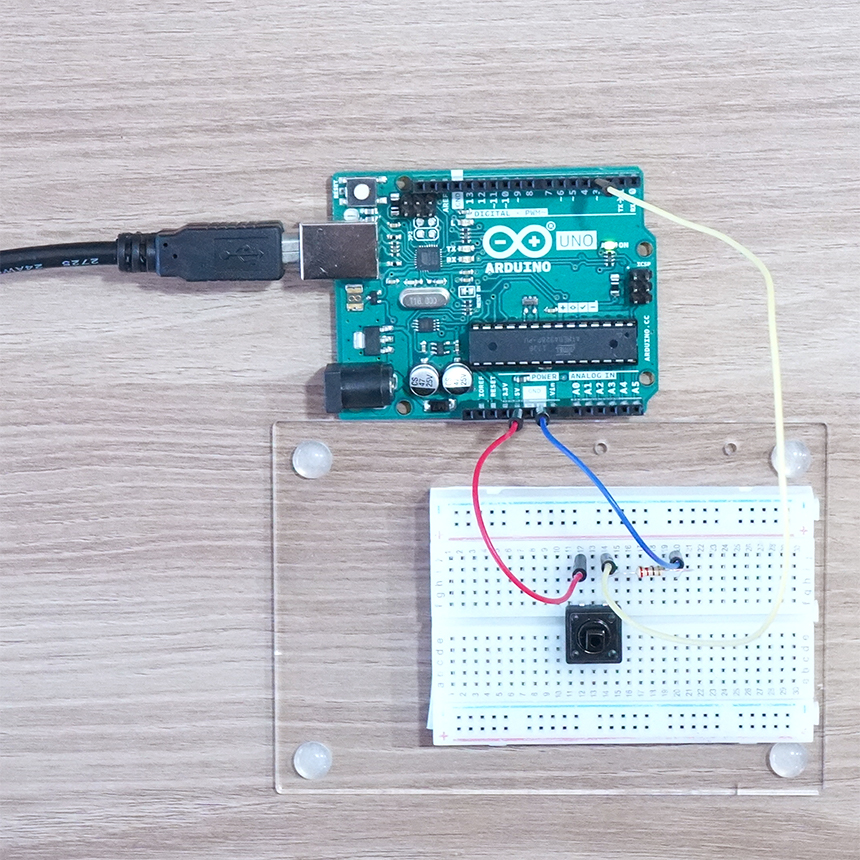
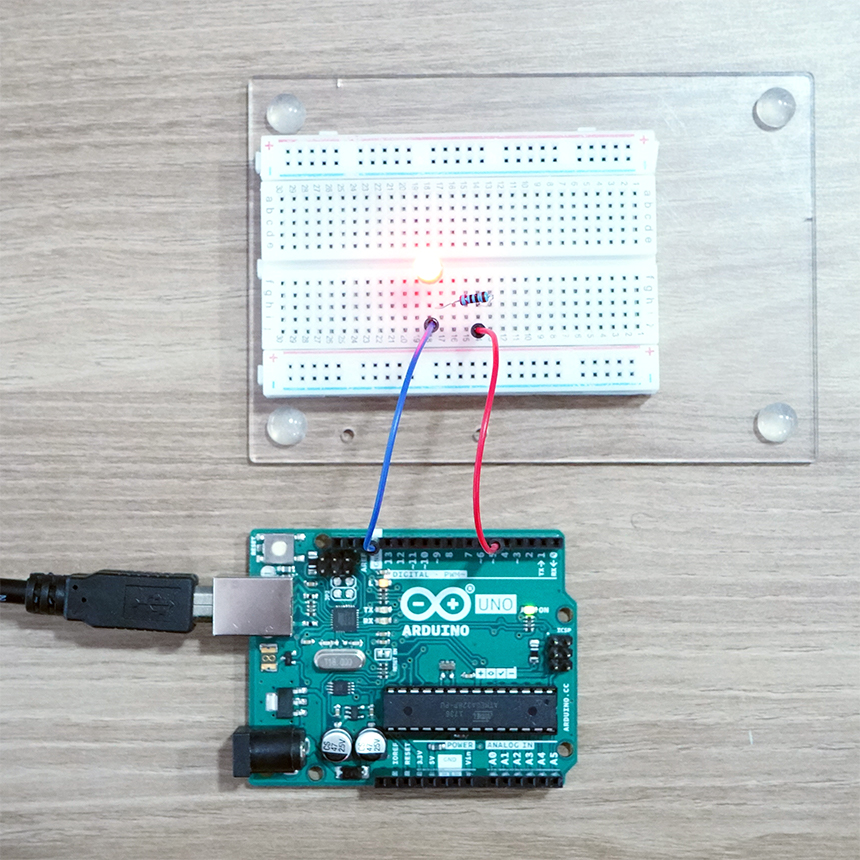
푸시버튼 스위치는 회로구성에 있어서 기본이 되는 전자부품으로 모터와 같은 장치들을 온/오프하는 용도로 많이 사용됩니다. 이 번 실험에서는 푸시버튼 스위치로 회로구성을 한 후 아두이노 프로그램으로 입력을 받아 LED를 온/오프하는 방법에 대해서 알아봅니다.
여러가지 종류의 푸시버튼 스위치가 있으나 가장 많이 사용되는 6MM 또는 12MM TACT SWITCH를 가지고 실험합니다.
푸시버튼 스위치는 회로구성에 있어서 기본이 되는 전자부품으로 모터와 같은 장치들을 온/오프하는 용도로 많이 사용됩니다. 이 번 실험에서는 푸시버튼 스위치로 회로구성을 한 후 아두이노 프로그램으로 입력을 받아 LED를 온/오프하는 방법에 대해서 알아봅니다.
여러가지 종류의 푸시버튼 스위치가 있으나 가장 많이 사용되는 6MM 또는 12MM TACT SWITCH를 가지고 실험합니다.
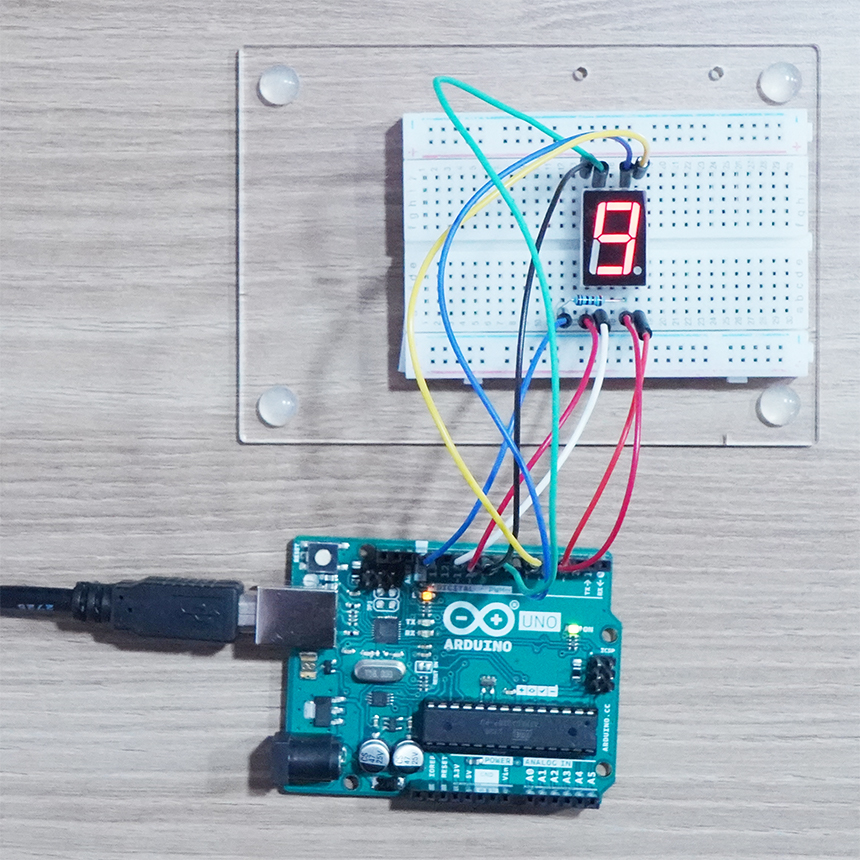
여기서는 숫자표시 LED인 7세그먼트 LED를 이용하여 숫자를 표시하는 실험을 합니다. 7세그먼트 LED는 8개의 LED(도트포함)로 구성되어 있으며 아두이노 보드의 8개의 디지털IO핀을 사용하여 각각의 LED를 ON/OFF함으로써 숫자를 표시하게 됩니다.
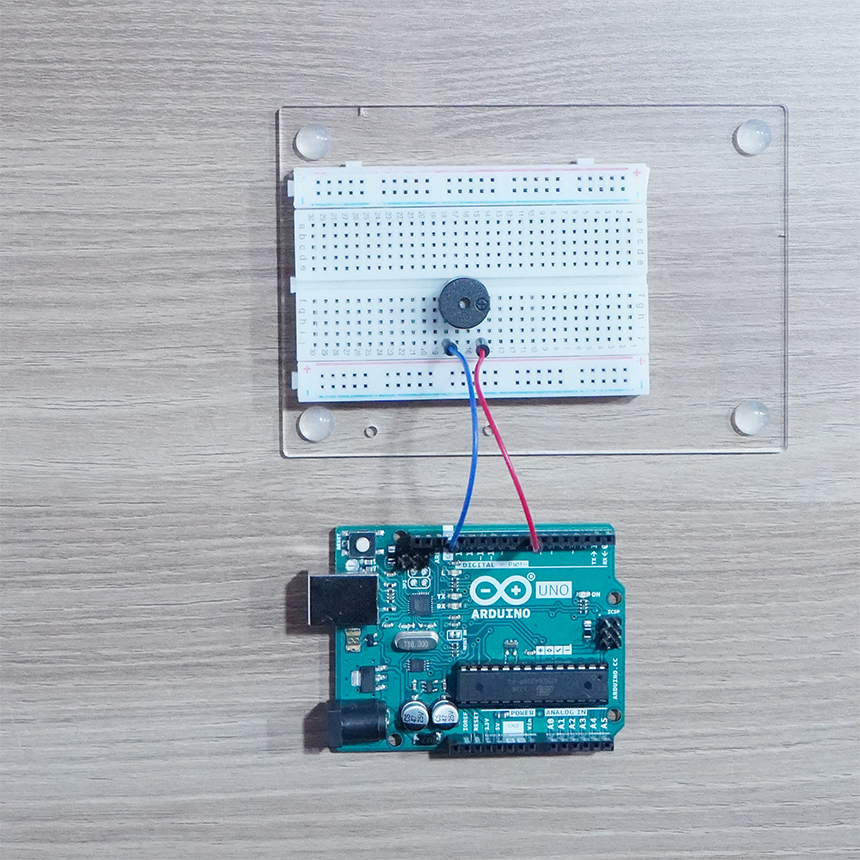
여기서는 패시브버저(Passive Buzzer)를 가지고 소리를 내는 실험을 해봅니다. 아두이노 우노보드에서는 2 가지의 주파수를 만들어내고 이 를 디지털IO 포트로 출력하는 프로그램을 작성하게 됩니다.
버저에는 패시브버저와 액티브버저(Active Buzzer)가 있으며 이 둘의 차이점은 다음과 같습니다.
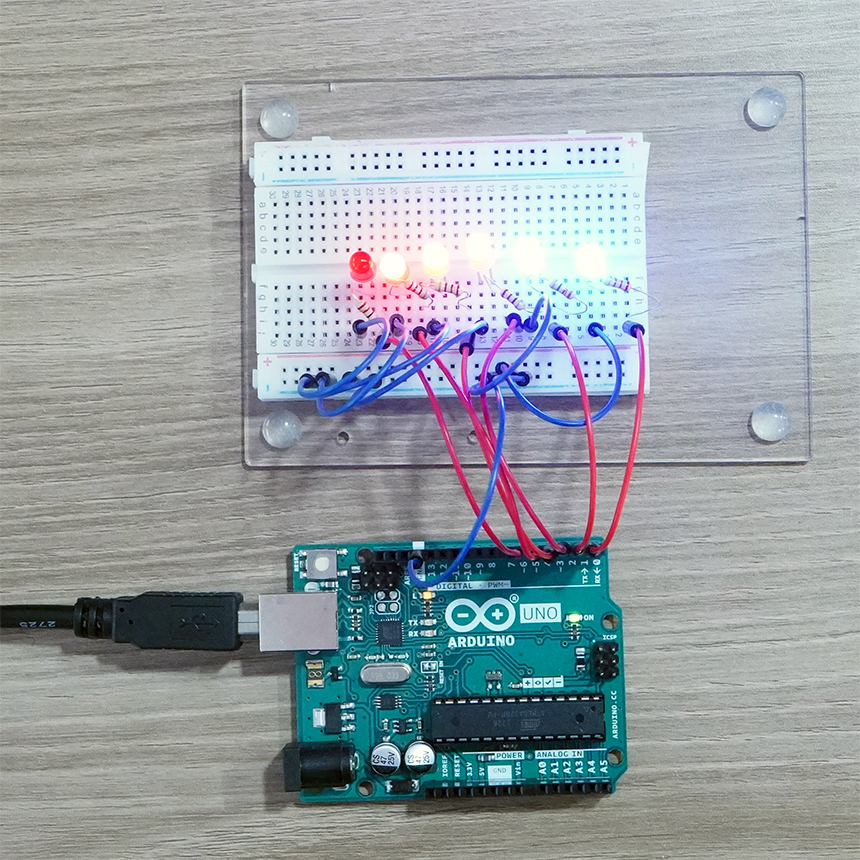
여기서는 기본실습 1을 확장하여 6개의 LED를 이용한 실습을 해보겠습니다. LED를 점멸하는 방법 및 6개의 LED를 각각 어떻게 제어하는지 프로그램을 통해 알아봅니다.
아두이노 우노보드를 이용한 LED 점등 실험을 합니다. 정확하게는 아두이노 우노보드의 디지털IO를 사용하여 LED를 2초 간격으로 ON/OFF(점멸)하게 합니다.
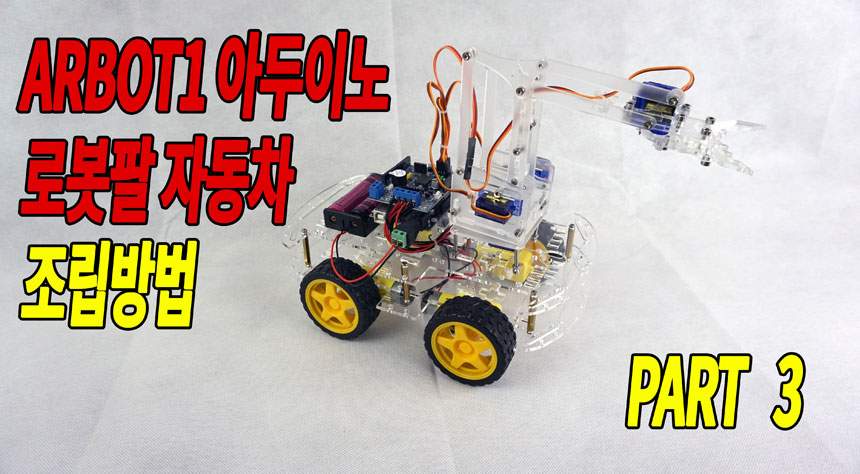
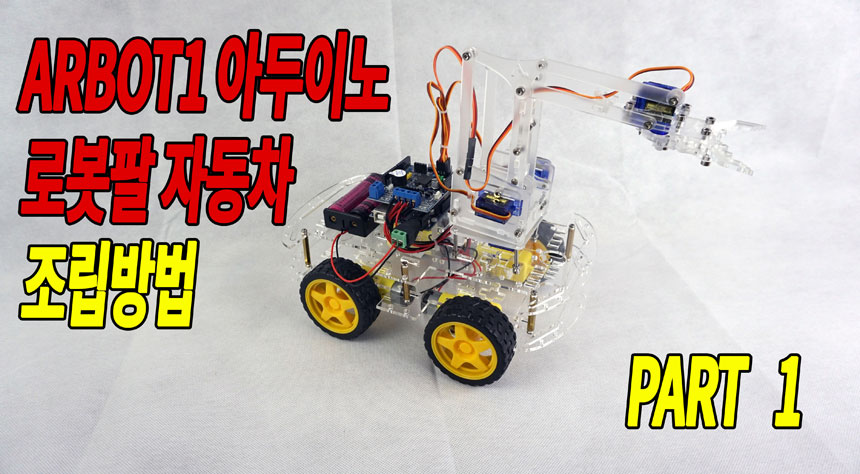
ARBOT1은 아두이노 4자유도 로봇팔과 4WD자동차가 결합된 스마트카로봇입니다. 아크릴 4자유도 로봇과 4WD 차대와 결합하여 자동차 주행 및 로봇팔 구동실험을 할 수 있습니다. 18650 배터리 2개를 사용하여 강력한 구동으로 장시간 사용이 가능합니다.
PART3에서는 차대1번과 차대2번을 결합하고 결선을 마무리하여 로봇팔자동차를 완성하게 됩니다.
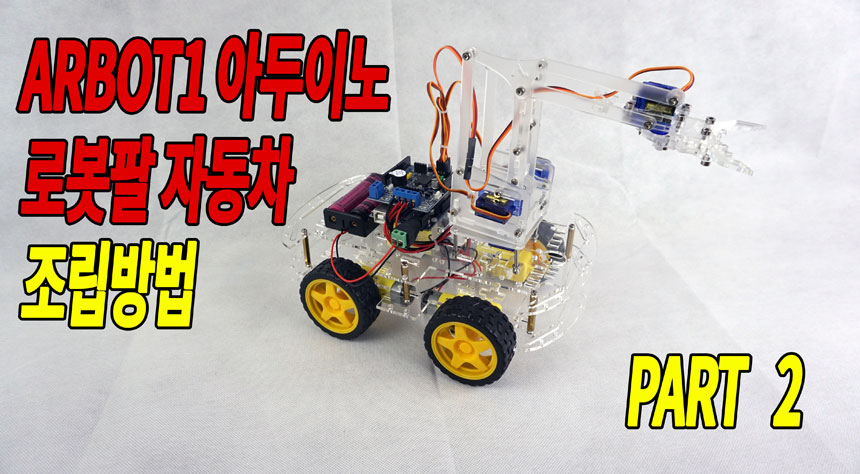
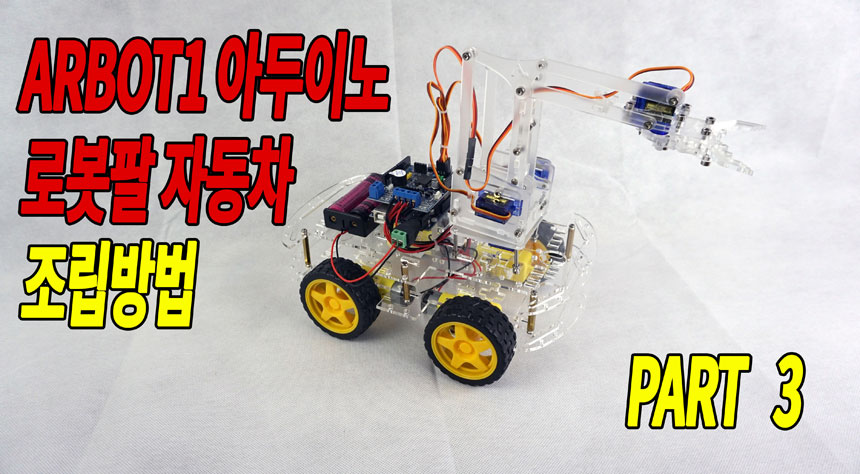
ARBOT1은 아두이노 4자유도 로봇팔과 4WD자동차가 결합된 스마트카로봇입니다. 아크릴 4자유도 로봇과 4WD 차대와 결합하여 자동차 주행 및 로봇팔 구동실험을 할 수 있습니다. 18650 배터리 2개를 사용하여 강력한 구동으로 장시간 사용이 가능합니다.
PART2에서는 차대 2번에 아두이노보드,드라이버보드,배터리케이스 그리고 조립된 로봇팔을 올리게 됩니다.
ARBOT1은 아두이노 4자유도 로봇팔과 4WD자동차가 결합된 스마트카로봇입니다. 아크릴 4자유도 로봇과 4WD 차대와 결합하여 자동차 주행 및 로봇팔 구동실험을 할 수 있습니다. 18650 배터리 2개를 사용하여 강력한 구동으로 장시간 사용이 가능합니다.
안드로이드폰과 블루투스로 연결하여 제어가 가능합니다. 안드로이드 플레이스토어에서 앱을 다운받아 사용하시면 됩니다.