6자유도 알루미늄 로봇팔 로봇암 구동부 조립방법
조립이 완료된 6자유도 알루미늄 로봇팔을 구동하기 위한 구동부의 조립방법에 대해서 설명합니다. 로봇팔에 구동부를 결합한 후 아두이노에 프로그램을 업로드하게 되면 3개의 조이스틱 스위치를 사용하여 총 6개의 서보모터를 각각 제어할 수 있게 됩니다.
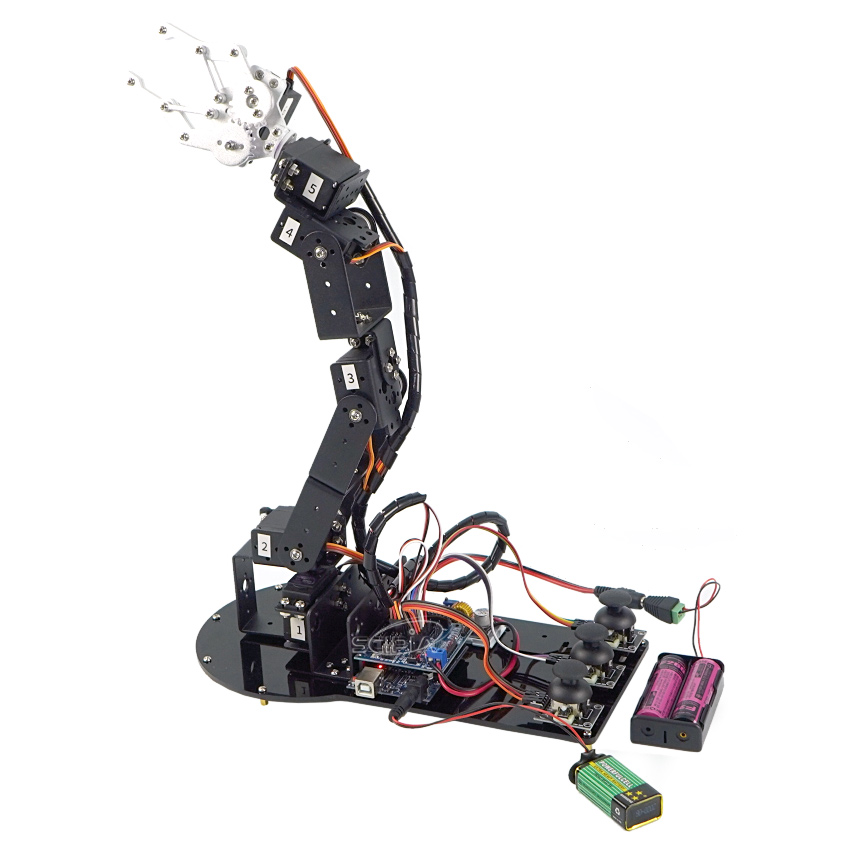
조립이 완료된 6자유도 알루미늄 로봇팔을 구동하기 위한 구동부의 조립방법에 대해서 설명합니다. 로봇팔에 구동부를 결합한 후 아두이노에 프로그램을 업로드하게 되면 3개의 조이스틱 스위치를 사용하여 총 6개의 서보모터를 각각 제어할 수 있게 됩니다.
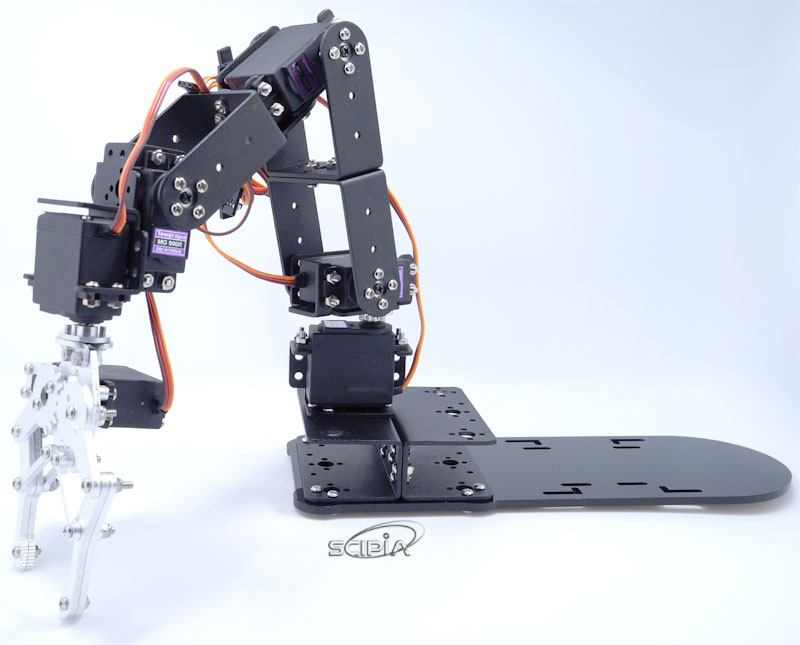
알루미늄 브라켓과 6개의 메탈서보모터를 사용한 6자유도 로봇의 기구부 조립방법에 대하여 설명합니다. 구동부에 설명은 2편을 참조하시기 바랍니다.
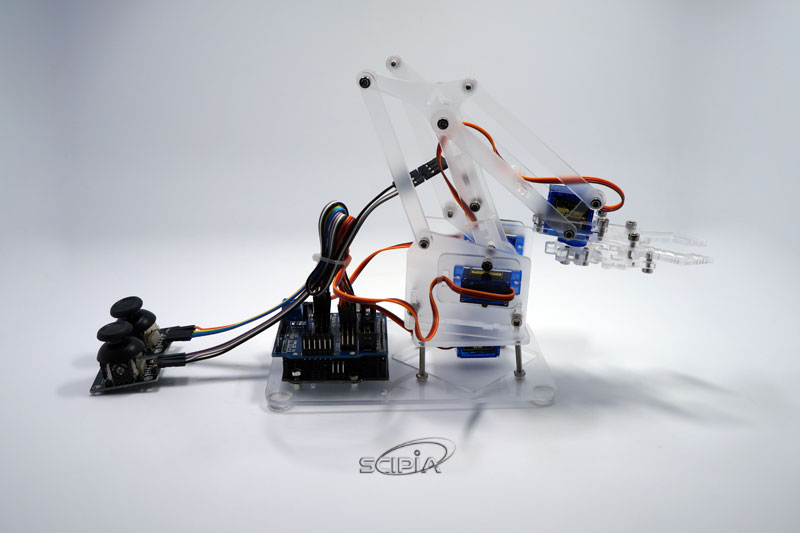


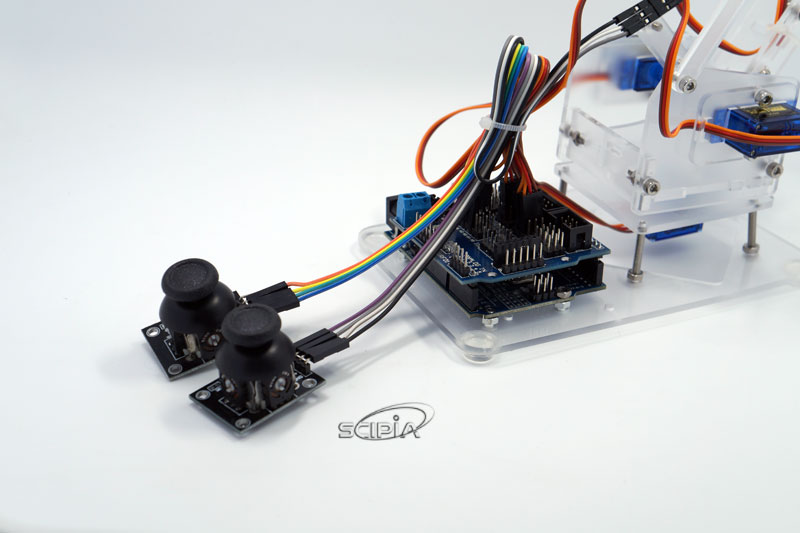
조립 완료된 4자유도 아크릴 로봇팔을 아두이노 우노보드로 프로그램하고 제어하는 방법에 대해 알아봅니다. 로봇팔은 총 4개의 서보모터로 구동되며 각각 좌우회전, shoulder(어깨)축 이동, elbow(팔꿈치)축 이동, 그립퍼 열고 닫기를 담당합니다. 아두이노 우노보드에 센서쉴드보드를 결합하여 결선을 최소화하고 조이스틱모듈 2개를 사용하여 로봇팔을 조정하게 됩니다.